| \(i\) | \(x_i\) |
|---|---|
| 1 | 10 |
| 2 | 20 |
| 3 | 30 |
| 4 | 35 |
| 5 | 40 |
Anhang A — Mathematische Grundlagen
A.1 Rechenregeln basics
Hier eine kurze Wiederholung der üblichen Rechenregeln, die aus der Schule bekannt sein sollten. Dies sind einmal die Klammer vor Punkt vor Strich Regel
\[\begin{align*} 1 + 3 \times 2 &= 7 \\ 7 + 12 / 4 &= 10 \\ (3 + 7) / 5 + 1 &= 3 \end{align*}\]
Und das Distributivgesetz zum ausmultiplizieren bzw. zusammenfassen von Klammern.
\[\begin{align*} a \times (b + c) &= a\times b + a\times c \\ 2 \times (3 + 4) &= 2 \times 3 + 2 \times 4 \\ 10 a + a b &= a (10 + b) \end{align*}\]
Was auch noch bekannt sein sollte, sind die Binomischen Formeln.
\[\begin{align*} (a+b)^2 &= a^2 + 2ab + b^2 \\ (a-b)^2 &= a^2 - 2ab + b^2 \\ (a+b)(a-b) &= a^2 - b^2 \end{align*}\]
A.1.1 Das Summenzeichen
Ein immer wiederkehrender Operator in der Statistik ist das Summenzeichen \(\sum\). Das Summenzeichen hat üblicherweise einen Laufindex der zusammen mit einem Anfangswert unter dem Summenzeichen steht. Über dem Summenzeichen steht der Endwert für den Laufindex. Zum Beispiel.
\[ \sum_{i=0}^{2} i = (i=0) + (i=1) + (i=2) = 0 + 1 + 2 = 6 \] {eq-example-sum}
Hier ist der Laufindex \(i\) mit dem Startwert \(i=0\) und dem Endwert \(i=2\). Die Index \(i\) durchläuft alle Ganzzahlen zwischen dem Start- und dem Endwert. Für den Laufindex werden meistens die Buchstaben \(i,j,k\) verwendet. Dies ist aber keine feste Regel sondern, wie immer in der Mathematik, jeder Buchstabe ist prinzipiell möglich und Buchstaben sind nur Konventionen unterworfen. Buchstaben sind wie immer nur Platzhalter für konkrete Werte. Daher sind diese beiden Summen gleich.
\[ \sum_{i=0}^2 i = \sum_{j=0}^2 j \]
Da für jeden Wert des Laufindex ein Summand erstellt wird, resulieren die beiden Schreibwesen in identischen Termen.
Im Gegensatz zu diesem Beispiel, wird in den meisten Fällen der Laufindex nicht direkt in den Summanden geschrieben sondern der Laufindex wird dazu verwendet eine Menge von weiteren Werten zu indizieren. Sei zum Beispiel eine Menge von sechs Datenpunkte z.B. \(\{10, 20, 30, 35, 40\}\) gegeben. Dann könnten diese Datenpunkte mittels einer Variablen beispielsweise dem Buchstaben \(x\) repräsentiert werden und die einzelnen Werte mit Hilfe eines Laufindexes bestimmt werden (siehe Tabelle A.1).
Soll nun über alle Datenpunkte summiert werden dann kann dies wie folgt mittels des Summenzeichens dargestellt werden.
\[ \sum_{i=1}^5 x_i = 10 + 20 + 30 + 35 + 40 = 135 \]
Für das Summenzeichen gelten, dass es sich letztendlich nur um eine Addition handelt. Daher gelten die gleichen Regeln wie bei der einfachen Addition. Dementsprechend ergeben sich die folgenden Regeln:
\[ \begin{aligned} \sum_{i=0}^{n}(a_i+b_i) &= \sum_{i=0}^{n}a_i + \sum_{i=0}^{n}b_i \\ \sum_{i=0}^{n}a \times b_i &= a\sum_{i=0}^{n}b_i \\ \sum_{k=1}^{n} \frac{a_k}{n} &= \frac{1}{n}\sum_{k=1}^{n} a_i = \frac{1}{n}(a_1 + a_2 + \ldots + a_n) \\ \sum_{i=1}^{n} a &= a + a + \ldots + a = n \times a \end{aligned} \]
A.1.2 Das Produktzeichen
Neben dem Summenzeichen, kommt auch immer wieder mal das Produktzeichen \(\prod\) zur Anwendung. Wie der Name schon vermuten lässt, wird bei dem Produktzeichen die Addition durch die Multiplikation ersetzt.
\[ \prod_{i=0}^n x_i = x_1 \times x_2 \times \cdots \times x_n \]
Wieder angewendet auf eine Menge von Datenpunkte \(\{1,2,3\}\) könnte das Produkt der Zahlen wie folgt dargestellt werden.
\[ \prod_{i=1}^3 x_i = 1 \cdot 2 \cdot 3 = 6 \]
Für das Produkt ergeben sich auch wieder ein paar Rechenregeln:
\[ \begin{aligned} \prod_{i=0}^n a \cdot x_i &= a\cdot x_1 \cdot a\cdot x_2 \cdots a\cdot x_n = a^n \prod_{i=0}^n x_i \\ \prod_{i=1}^n a_i\cdot b_i \cdot c_i &= \prod_{i=1}^n a_i \prod_{i=1}^n b_i \prod_{i=1}^n c_i \end{aligned} \]
A.2 Lösen einer Gleichung
Aus der Schule sollte auch noch das Lösen von Gleichungen bekannt sein. Zum Beispiel um eine Gleichung der folgenden Form zu lösen.
\[ 3 x + 7 = 16 \]
Können Terme mit den Terme auf beiden Seiten der Gleichen entweder addiert, subtrahiert, multipliziert oder dividiert werden um die Gleichung in eine Lösung der Form $x = $ zu bringen. Im Beispiel:
\[ \begin{aligned} 3x + 7 &= 16 & \mid -7 \\ 3x + 7 - 7 &= 16 - 7 & \\ 3x &= 9 & \mid :3 \\ x &= 3 & \end{aligned} \]
A.3 Funktionen
A.3.1 Lineare Funktion
Der einfachste Typ von Funktion nach den konstanten Funktion \(f(x) = a\) ist die Gerade bzw. lineare Funktion. Die Funktion der Gerade setzt sich aus einem \(y\)-Achsenabschnitt \(a\) und einer Steigung \(b\) zusammen.
\[ y = a + bx \]
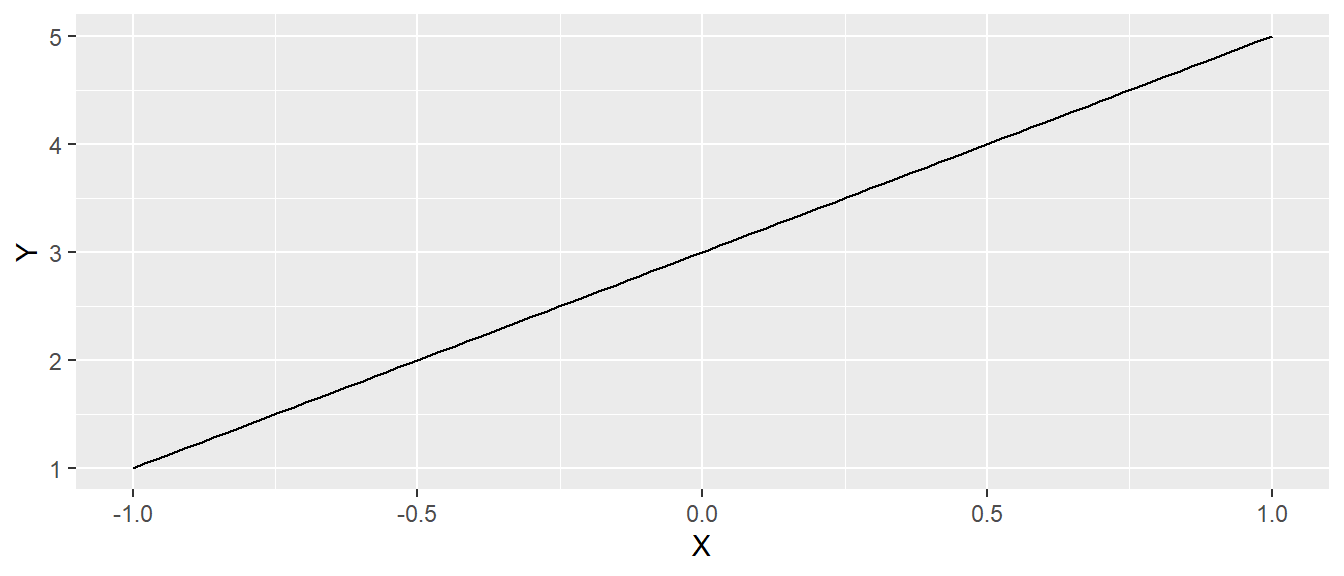
Aus der Schule dürfte dies als Punkt-Steigungsform (vielleicht in der Form \(y = mx + b\)) bekannt sein. Bei einer positiven (negativen) Steigung (\(a > 0\)) steigen (fallen) die \(y\)-Werte gegen \(\infty\) (\(-\infty\)) wenn die \(x\)-Werte gegen \(\infty\) (\(-\infty\)) gehen. In Abbildung A.1 ist der Graph der Funktion \(y = 3x + 1\) abgetragen.

In Abbildung A.1 ist zu erkennen, dass auf Grund der positiven Steigung \(b = 3\) die \(y\)-Werte größer werden, umso größer die \(x\)-Werte werden. Der Zuwachs der \(y\)-Werte ist dabei konstant. Wenn \(x\) um eine Einheit vergrößert wird, dann vergrößert sich \(y\) um \(3\) Einheiten.
Die Gerade kann als eine Funktion angesehen welche \(x\)-Werte auf \(y\)-Werte abbildet. \(y = a + bx\) kann daher auch als \(f(x) = a + bx\) interpretiert werden. Bzw. im konkreten Fall von Abbildung A.1 als \(f(x) = 3x + 1\). D.h. wenn ich einen \(x\)-Wert in die Funktion \(f(x)\) einsetzte, wird der entsprechenden \(y\)-Wert erhalten, z.B. \(f(2) = 3 \times 2 + 1 = 7\).
A.3.2 Polynome
Ein Polynom ist ein mathematischer Ausdruck, der aus einer Summe von mehreren Termen besteht, wobei jeder Term aus einer Konstanten (dem Koeffizienten) und einer oder mehreren Variablen, die mit einer Potenz versehen sind, besteht. Ein Beispiel ist die Funktion:
\[ 3x^2 + 2x - 5 \]
Die höchste Potenz der Variable bestimmt den Grad des Polynoms; in diesem Fall ist der Grad 2, da \(x^2\) die höchste Potenz ist. Polynome der ersten drei Grade haben eigene Bezeichnungen.
- Lineares Polynom: Ein Polynom vom Grad 1, z.B. \(2x + 3\). Der Graph ist immer eine Gerade und daher ist eine lineare Funktion auch ein Polynom 1. Grades.
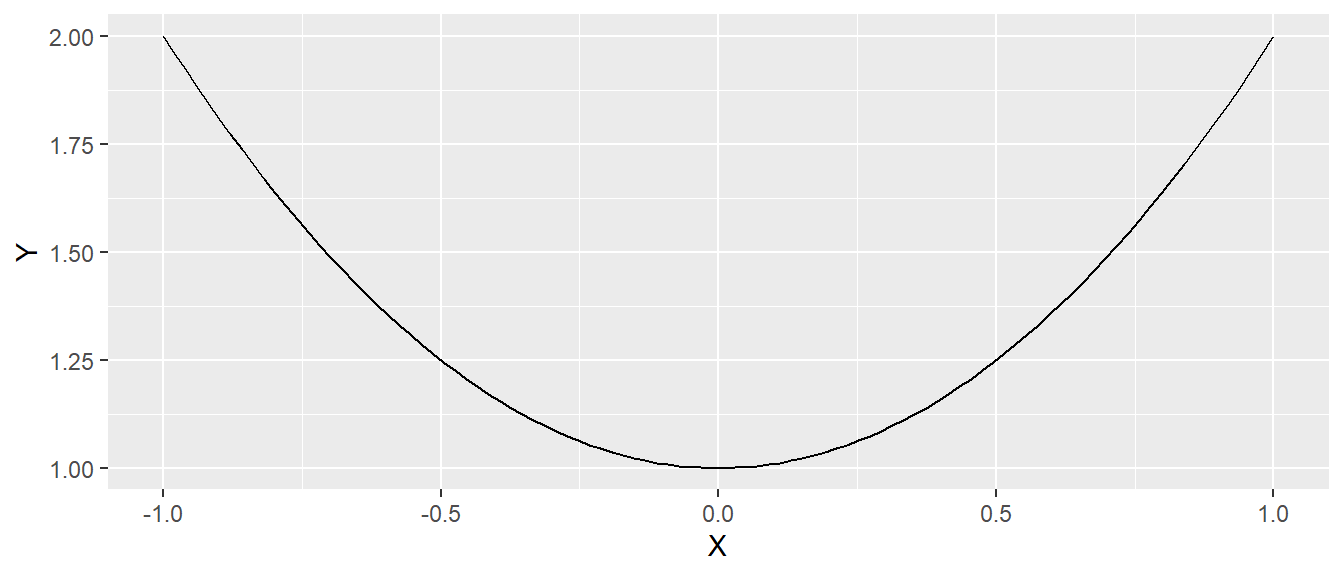
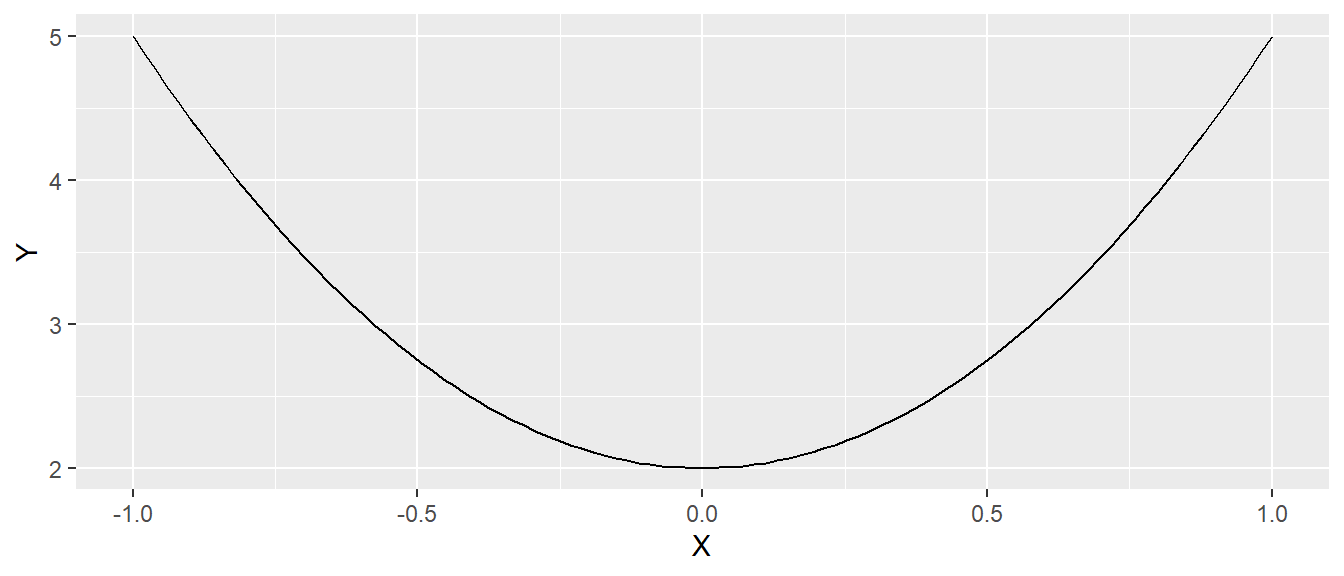
- Quadratisches Polynom: Ein Polynom vom Grad 2, z.B. \(x^2 - 4x + 4\). Der Graph ist eine Parabel.
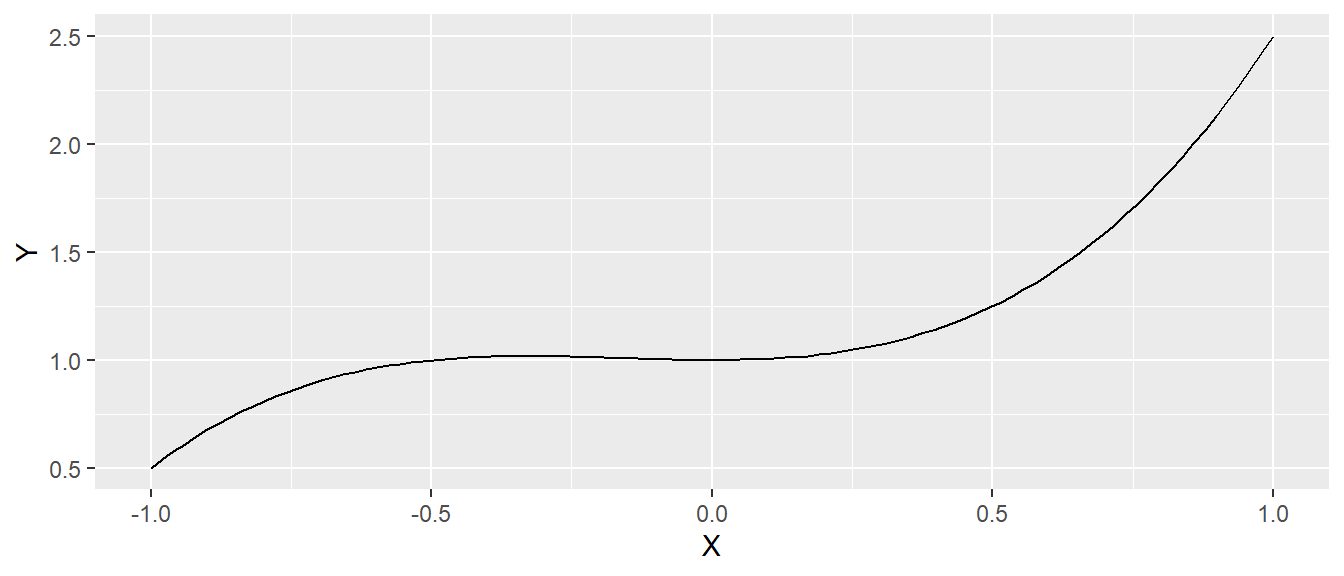
- Kubisches Polynom: Ein Polynom vom Grad 3, z.B. \(x^3 + x - 6\). Der Graph hat eine geschwungene Form mit möglichen Wendepunkten.
Mit Hilfe des Summenzeichens lässt sich ein Polynom ebenfalls kurz darstellen.
\[ \prod_{i=0}^n a_i x^i = a_0 + a_1 \cdot x + a_2 \cdot x^2 + \cdots + \]
Im Zusammenhang mit dem Lösen von quadratischen Gleichung sollte noch die p-q-Formel geläufig sein. Wenn eine Gleichung der Form \(x^2 + p\cdot x + q = 0\), also ein Polynom zweiten Gerades gelöst werden soll, dann kann diese relativ simple über die p-q-Formel durchgeführt werden.
\[ x_{1,2} = -\frac{p}{2}\pm\sqrt{\left(\frac{p}{2}\right)^2-q} \tag{A.1}\]
Der Term unter der Wurzel wird als die Diskriminante bezeichnet und es können drei Fälle unterschieden werden.
\[ \left(\frac{p}{2}\right)^2-q = \begin{cases} > 0: \text{zwei Lösungen} \\ =0: \text{eine Lösung} \\ < 0: \text{keine reele Lösung} \end{cases} \]
Beispiel A.1 Es soll die folgende Gleichung gelöst werden:
\[ x^2 + 4x + 3 = 0 \Rightarrow p=4, q=3 \] Mit \(p = 4\) und \(q=3\) folgt durch einsetzen in Gleichung A.1:
\[ x_{1,2} = -\frac{4}{2}\pm\sqrt{\left(\frac{4}{2}\right)^2-3} = -2 \pm 1 \]
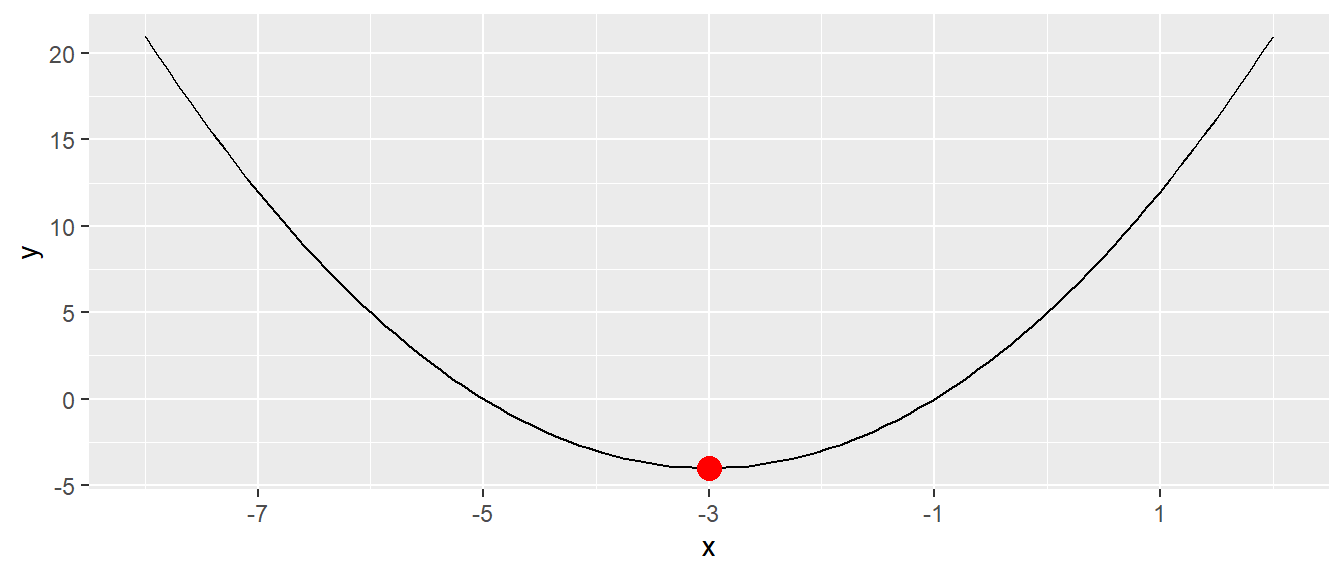
Manchmal kann auch ein Trick angewendet werden um eine Lösung mittels einer Quadratischen Ergänzung zu erhalten. Sei Beispielsweise das folgende Polynom gegeben und von Interesse ist der Scheitelpunkt des Graphen.
\[ f(x) = x^2 + 6x + 5 \]
Die ersten beiden Terme \(x^2 + 6x\) sehen in etwa so aus, wie ein Teil der binomischen Formel. Der Term \(3x\) wäre dementsprechend der Teil \(+2ab\) während \(x^2\) der Term \(a^2\) wäre woraus folgt das \(a=x\) ist. D.h. es fehlt jetzt noch der Wert für \(b\). Mit \(a=x\) folgt jedoch:
\[ 6x = 2ab = 2xb \]
Daraus lässt sich nun wieder ablesen, dass \(b = 3\) sein muss. Um nun die binomische Formel mittels quadratischer Ergänzung zu vervollständigen fehlt in der Ursprungsformel Formel \(x^2 + 6x + 5\) der Term \(b^2 = 9\). Dazu wird nun \(0\) in der Form \(+9 - 9\) zu der Formel hinzugefügt.
\[ x^2 + 6x + 9 - 9 + 5 = x^2 + 6x + 9 - 4 \]
Die ersten drei Terme können nun mittels der binomischen Formel zusammengefasst werden.
\[ x^2 + 6x + 9 - 4 = (x+3)^2-4 \] Damit liegt der Scheitelpunkt der Parabel bei \((-3,-4)\).
Die quadratische Ergänzung findet immer wieder im Zusammenhang mit der Normalverteilung eine Anwendung, wenn der Term im Exponent auf die Standardform gebracht werden muss.
A.3.3 Exponentialfunktion
Eine Exponentialfunktion ist eine mathematische Funktion der Form:
\[\begin{equation*} f(x) = a \cdot b^x \end{equation*}\]
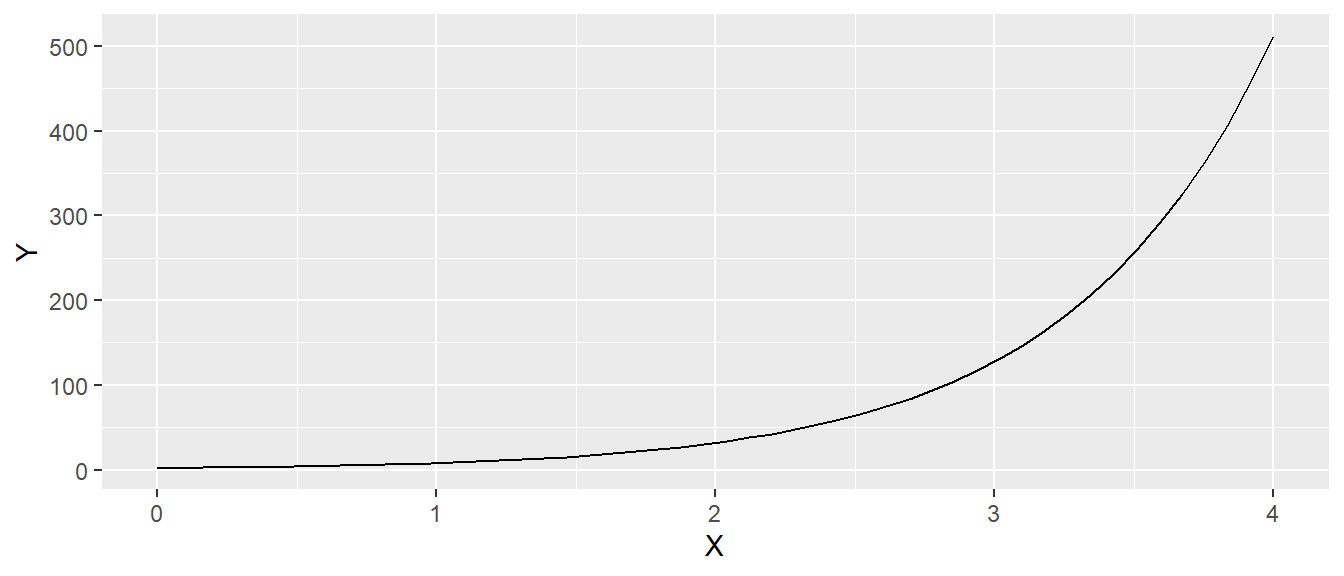
Der Term \(a\) ist eine Konstante während \(b\) als Basis bezeichnet wird. Die Basis \(b\) ist eine positive Zahl, die größer als null ist und bestimmt, wie schnell die Funktion wächst oder abnimmt. Wenn \(b>1\) gilt, dann wächst die Funktion exponentiell, was bedeutet, dass die Funktion immer schneller ansteigt. Wenn \(0< b<1\), sinkt die Funktion exponentiell, was bedeutet, dass die Funktion immer langsamer abnimmt.
Exponentialfunktionen werden oft verwendet, um Wachstum oder Zerfall zu beschreiben, wie z. B. das Wachstum einer Bakterienkultur, das Bevölkerungswachstum oder den radioaktiven Zerfall. Ein charakteristisches Merkmal von Exponentialfunktionen ist, dass sich der Wert bei einem festen Abstand auf der x-Achse immer um den gleichen Faktor ändert, was zu einem sehr schnellen Anstieg oder Abfall führen kann. Bei Beispiel für eine exponentiellen Funktion könnte z.B. \(f(x) = 2 \cdot 4^x\) sein.
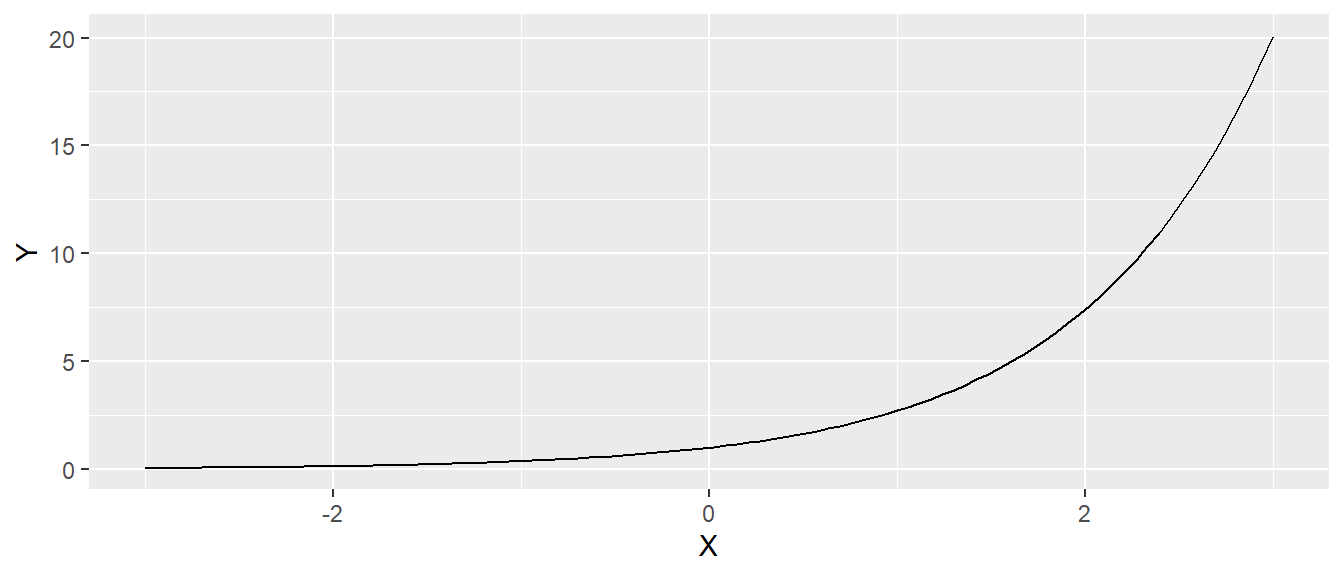
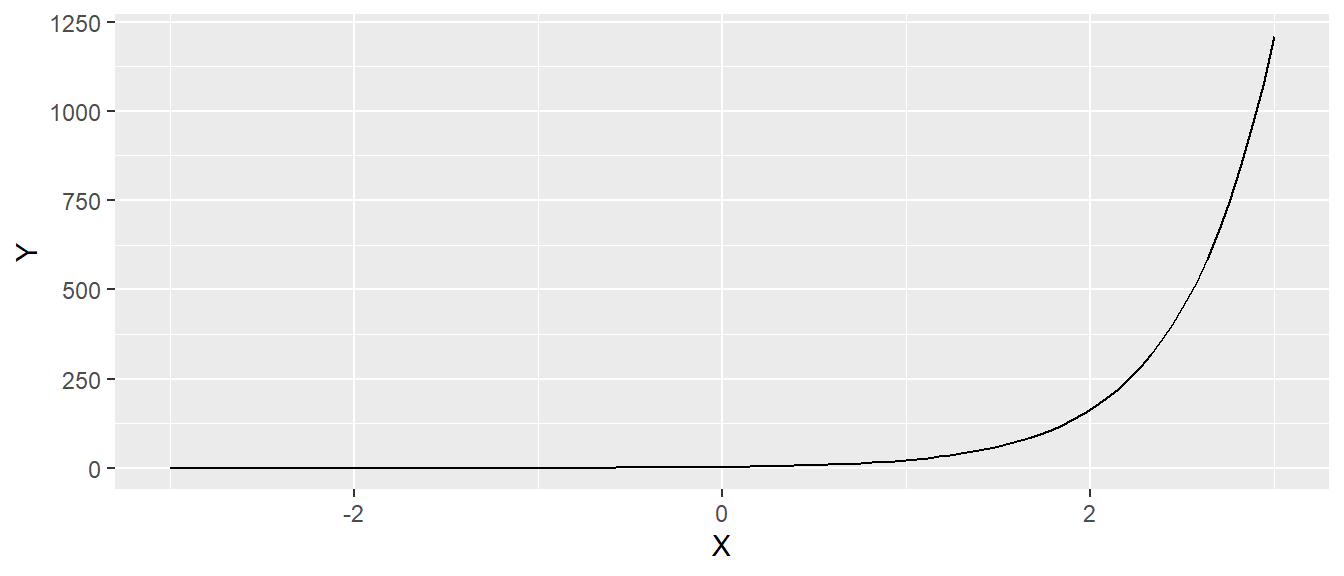
Eine zentrale Rolle in der Statistik, wie auch in der restlichen Mathematik, spielt die Exponentialfunktion zur Basis \(e\), die als natürliche Exponentialfunktion bezeichnet wird. \(e\) ist die Euler’sche Zahl und hat ungefähr den Wert \(e \approx 2,718\). In der Statistik kommt die natürliche Exponentialfunktion oft in der folgenden Form vor:
\[ f(x) = a \cdot e^{bx} \] Hierbei ist \(a\) der Wert den Funktion für \(x=0\), der y-Achsenabschnitt, einnimmt, während die Konstante \(b\) die Steigung verändert. In Abbildung A.5 sind verschiedene natürliche Exponentialfunktionen abgetragen.
Für die Exponentialfunktion gelten die folgenden Rechenregeln:
\[\begin{align*} a^m \cdot a^n &= a^{m+n} \\ \frac{a^m}{a^n} &= a^{m-n}, \quad (a \neq 0) \\ (a^m)^n &= a^{m \cdot n} \\ (a \cdot b)^n &= a^n \cdot b^n \\ \left(\frac{a}{b}\right)^n &= \frac{a^n}{b^n}, \quad (b \neq 0) \\ a^0 &= 1, \quad (a \neq 0) \\ a^{-n} &= \frac{1}{a^n}, \quad (a \neq 0) \\ a^1 &= a \end{align*}\]
Eine Exponentialfunktion \(f(x) = a \cdot b^x\) mit \(a>0\) und Basis \(b>1\) ist streng monoton wachsend.
\[ x_1 < x_2 \Rightarrow a\cdot b^{x_1} < a\cdot b^{x_2} \]
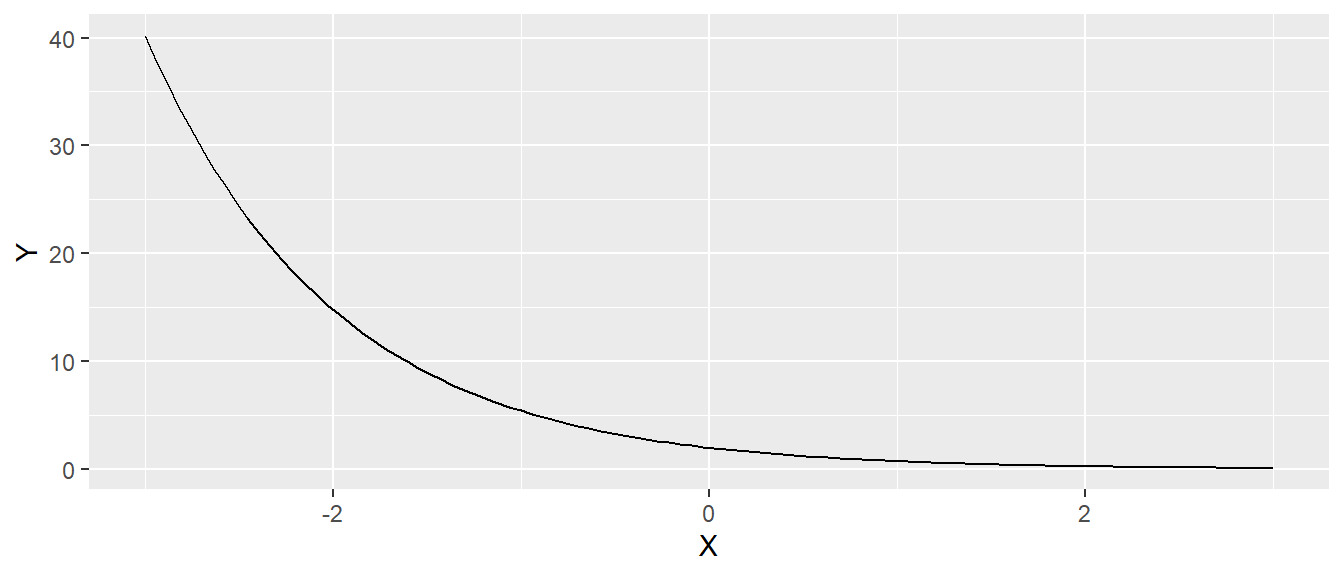
Für \(0<b<1\) ist die Funktion streng monoton fallend, während sie für \(b=1\) konstant ist.
A.3.4 Logarithmus
Die Umkehrfunktion zur Exponentialfunktion ist der Logarithmus. Die Logarithmusfunktion ist insbesondere im Zusammenhang mit dem Maximum-Likelihood Prinzip in der Statistik von großer Bedeutung.
Der Logarithmus einer positiven Zahl \(x\) zur Basis \(b>0\), \(b \neq 1\), ist diejenige Zahl \(y\), für die gilt:
\[ \log_b(x) = y \quad \Longleftrightarrow \quad b^y = x. \]
Dies bedeutet, dass der Logarithmus angibt, zu welcher Potenz die Basis \(b\) erhebt werden muss, um den Wert von \(x\) zu erhalten. In der Statistik wird meist der natürliche Logarithmus verwendet, der Logarithmus zur Basis \(e \approx 2{,}718\), der mit \(\log(x)\) oder \(\ln(x)\) bezeichnet wird. Der natürliche Logarithmus ist die Umkehrfunktion zur natürlichen Exponentialfunktion \(f(x) = e^x\). Es gilt.
\[ \log(e^x) = x \]
Der Graph des natürlichen Logarithmus \(\log(x)\) sieht wie folgt aus (siehe Abbildung A.6).
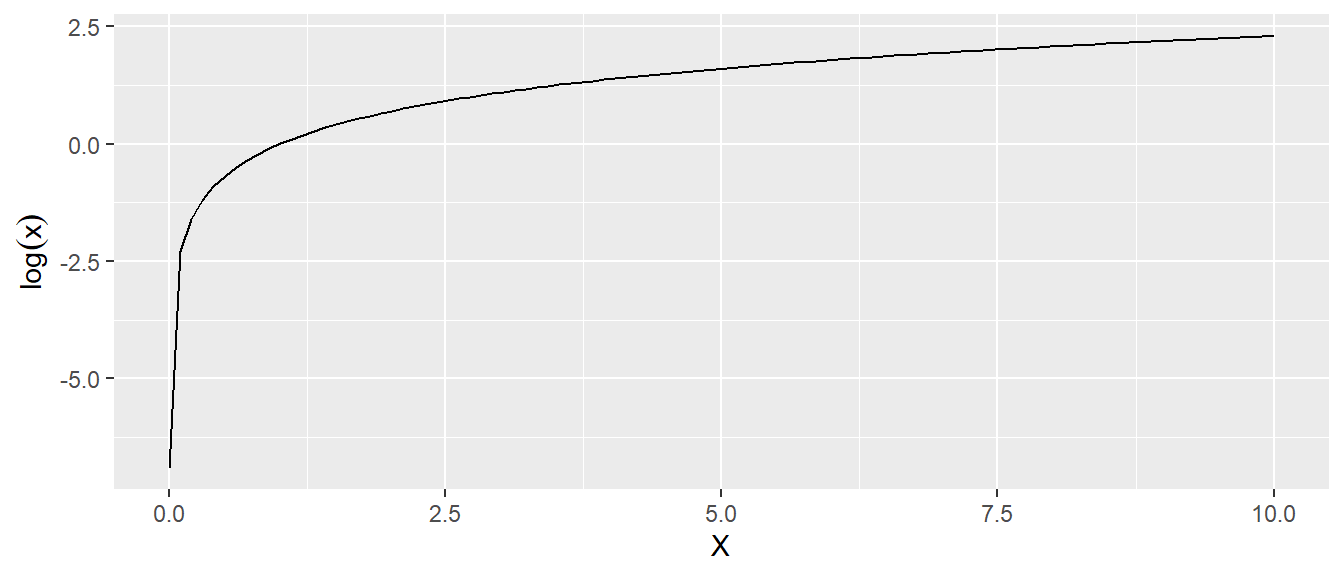
Für das Argument \(x\) der Logarithmusfunktion gilt, dass \(x>0\) sein muss, d.h. die Logarithmusfunktion ist auf \(\mathbb{R}^+\) definiert. Der Logarithmus ist ebenfalls für \(b>1\) eine streng monoton wachsende Funktion Funktion, d.h. es gilt:
\[ x_1 < x_2 \Rightarrow \log_b(x_1) < \log_b(x_2). \]
Für die Logarithmusfunktion gelten die folgenden Rechenregeln.
\[\begin{align*} \log_b (x \cdot y) &= \log_b (x) + \log_b (y) \\ \log_b \left(\frac{x}{y}\right) &= \log_b (x) - \log_b (y) \\ \log_b (x^n) &= n \cdot \log_b (x) \\ \log_b (1) &= 0 \end{align*}\]
Insbesondere die erste Rechenregel die aus einer Multiplikation eine Addition macht, wird in der Statistik als Trick zur Vereinfachungen von Berechnungen relativ oft eingesetzt.
Beispiel A.2 Sei zum Beispiel das Produkt aus drei Zahlen \(x_1\), \(x_2\) und \(x_3\) gegeben.
\[\begin{equation*} \prod_{i=1}^3 x_i = x_1 \cdot x_2 \cdot x_3 \end{equation*}\]
Dann kann aus der Multiplikation eine Addition gemacht werden, indem auf das Produkt der Logarithmus angewendet wird. .
\[ \log\left(\prod_{i=1}^3 x_i \right) = \log(x_1 \cdot x_2 \cdot x_3) \]
Unter der Anwendung der Rechenregeln folgt nämlich:
\[ \log(x_1 \cdot x_2 \cdot x_3) = \log(x_1) + \log(x_2) + \log(x_3) \]
D.h. aus der Multiplikation ist eine Addition geworden.
Beispiel A.3 Die Addition aus Subtrakionsregel kann zum Beispiel benutzt werden um den Logarithmen von großen Zahlen schnell im Kopf zu rechnen.
\[ \log_2(128) = \log_2(4\cdot32) = \log_2(4) + \log_2(32) = 2 + 5 = 7 \]
A.4 Ableitung
In der Schule haben Ableitungen kennengelernt. Zur Erinnerung, die Ableitung einer Funktion \(y = f(x)\) beschreibt, wie stark sich der Funktionswert \(y\) ändert, wenn der Eingabewert \(x\) um einen kleinen Betrag \(h\) verändert wird. Genauer gesagt misst die Ableitung die momentane Änderungsrate der Funktion \(f(x)\) an einer bestimmten Stelle \(x\). Formal schreibt man für die Ableitung \(f'(x)\) der Funktion \(f(x)\) an der Stelle \(x\):
\[ \frac{d f(x)}{dx} = \lim_{h \to 0} \frac{f(x+h) - f(x)}{h} \tag{A.2}\]
Für die Ableitung wird auch die Kurzschreibweise \(\frac{d f(x)}{dx} = f'(x)\). Die Ableitung \(f'(x)\) beantwortet die Frage, wie stark ändert sich \(f(x)\), wenn man ein winzig kleines Stück \(h\) weitergeht. Das Stück \(h\) lässt man immer kleiner werden \(\lim_{h to 0}\). So erhält man die Steigung der Tangente an die Kurve von \(f(x)\) im Punkt \(x\). Hier zur Erinnerung noch mal ein Übersicht über die wichtigsten Ableitungsregeln für Polynome.
| Art | Regel | Beispiel |
|---|---|---|
| Potenz von \(x\) | \(\frac{d}{dx} \left( x^n \right) = n x^{n-1}\) | \(\frac{d}{dx} \left( x^5 \right) = 5x^4\) |
| Konstante | \(\frac{d}{dx}(c) = 0\) | \(\frac{d}{dx}(7) = 0\) |
| konstanter Faktor | \(\frac{d}{dx} \left( c \cdot f(x) \right) = c \cdot f'(x)\) | \(\frac{d}{dx} \left( 3x^4 \right) = 3 \cdot 4x^3 = 12x^3\) |
| Summe | \(\frac{d}{dx} \left( f(x) + g(x) \right) = f'(x) + g'(x)\) | \(\frac{d}{dx} \left( x^3 + 2x \right) = 3x^2 + 2\) |
Allgemein folgt aus diesen Regeln für ein Polynom vom Grad \(n\):
\[ f(x) = a_n x^n + a_{n-1} x^{n-1} + \dots + a_1 x + a_0 \]
gilt:
\[ f'(x) = n a_n x^{n-1} + (n-1)a_{n-1} x^{n-2} + \dots + a_1 \]
Sei zum Beispiel die Funktion \(y = f(x) = x^2\) gegeben und es soll die Steigung der Parabel im Punkt \(x = 1\) berechnet werden. Aus der Ableitungsregel für die Potenz folgt \(f'(x) = \frac{d x^2}{dx} = 2x\). Somit ergibt sich für die Ableitung im Punkt \(x = 1\) für die Ableitung und die Steigung in \(x\) der Wert \(f'(2) = 2 \cdot 2 = 4\). In Abbildung A.7 ist die Ableitung als die Tangente an \(f(x)\) im Punkt \(x = 1\) abgetragen.

Eine Regel die in der Statistik immer wieder zur Anwendung kommt, ist die sogenannte Kettenregel, wenn zwei Funktionen ineinander verschachtelt sind. Sei zum Beispiel die Funktionen \(h(x) = x^2\) und \(g(x) = \frac{1}{x}\) gegeben. Dann kann eine neue Funktion gebildet werden, indem die Funktion \(h(g(x))\) gebildet wird. Im Beispiel würde dies bedeuten:
\[ h(g(x)) = h\left(\frac{1}{x}\right) = \left(\frac{1}{x}\right)^2 \]
Dieser Funktion kann ein neues Symbol, zum Beispiel \(f(x)\), gegeben werden:
\[ f(x) = \left(\frac{1}{x}\right)^2 \]
Wenn nun die Funktion \(f(x)\) nach \(x\) abgeleitet werden soll, dann wird dazu die Kettenregel angewendet, wörtlich aus der Schule “äußere Ableitung mal innere Ableitung”.
\[ \frac{d}{dx} , g(h(x)) = g'(h(x)) \cdot h'(x) \]
Beispiel A.4 (Ableitung von \(f(x) = (x^2 + 1)^3\)) Sei \(f(x)\) gegeben durch.
\[ f(x) = (x^2 + 1)^3 \]
Dann ist die äußere Funktion: \(g(u) = u^3\) und die innere Funktion \(h(x) = x^2 + 1\), mit den Ableitungen
\[ g'(u) = 3u^2, \quad h'(x) = 2x \]
Eingesetzt ergibt sich für für die Ableitung von \(f(x)\):
\[ \frac{d f(x)}{dx} = g'(h(x)) \cdot h'(x) = 3(x^2 + 1)^2 \cdot 2x = 6x(x^2 + 1)^2 \]
Beispiel A.5 (Ableitung von \(f(x) = \sqrt{2x + 5}\)) Sei nun \(f(x) = \sqrt{2x + 5}\) geben, mit der Wurzel als Potenz geschrieben \(f(x) = (2x+5)^{1/2}\) ergibt sich, für die äußere Funktion: \(g(u) = u^{1/2}\) und für die innere Funktion: \(h(x) = 2x+5\). Damit folgt für die Ableitung der beiden Funktionen \(g'(u) = \tfrac{1}{2}u^{-1/2}, h'(x) = 2\). Daraus resultiert für die Ableitung von \(f(x)\).
\[ f'(x) = g'(h(x)) \cdot h'(x) = \tfrac{1}{2}(2x+5)^{-1/2} \cdot 2 = \frac{1}{\sqrt{2x+5}} \]
Beispiel A.6 (Ableitung von \(f(x) (3x^2-x)^4\)) Als letztes Beispiel sei die Funktion \(f(x) = (3x^2 - x)^4\) gegeben. Daraus können die folgenden Funktionen bestimmt werden, \(g(u) = u^4\) und \(h(x) = 3x^2 - x\) und es folgt für die Ableitungen, \(g'(u) = 4u^3, h'(x) = 6x - 1\), und es ergibt sich für die Ableitung von \(f(x)\), \(f'(x) = 4(3x^2 - x)^3 (6x - 1)\).
Zwei weitere Regeln sind im Zusammenhang für die Inhalte im Skript wichtig. Dies sind einmal die Ableitung für die natürliche Exponentialfunktion, es gilt für \(f(x) = e^x\):
\[ \frac{d f(x)}{dx} = \frac{d e^x}{dx} = e^x \] Unter Anwendung der Kettenregel gilt somit für \(f(x) = a \cdot e^{bx}\)
\[ \frac{d f(x)}{dx} = \frac{d~ae^{bx}}{dx} = abe^x \]
Für den natürlichen Logarithmus \(\ln(x)\) gilt die folgende Regel für die Ableitung.
\[ \frac{d\ln(x)}{dx} = \frac{1}{x} \]
A.5 Extremwerte einer Funktion
Extremwerte sind die höchsten oder tiefsten Punkte einer Funktion. In der Mathematik wird zwischen Hochpunkten (Maxima) und Tiefpunkten (Minima) unterschieden. Um Extremwerte eine Funktion \(f(x)\) zu finden, wird zunächst die Ableitung \(\frac{d f(x)}{dx}\) der Funktion gebildet. Punkte an denen die Steigung von \(f(x)\) gleich Null ist, also die Ableitung den Wert Null annimmt \(f'(x) = 0\), können potentiell einen Extremwert darstellen. Dementsprechend wird die Ableitung \(f'(x)\) der Funktion \(f(x)\) gleich null gesetzt und die entstehende Gleichung wird nach \(x\) gelöst.
Die Lösungen dieser Gleichung sind die Kandidaten für Extremwerte. Um herauszufinden, ob die gefundenen Punkte Hoch- oder Tiefpunkte sind, muss dann die zweite Ableitung der Funktion betrachtet werden. Die folgenden Fälle können unterschieden werden:
- Wenn \(f''(x) > 0\) an einem Punkt \(x\), dann handelt es sich um ein Minimum (Tiefpunkt).
- Wenn \(f''(x) < 0\), dann ist es ein Maximum (Hochpunkt).
- Wenn \(f''(x) = 0\), ist der Test nicht eindeutig und du musst andere Methoden verwenden.
Um die Extremwerte zu bekommen müssen dann die Werte der Funktion \(f(x)\) an den gefundenen Extrempunkten berechnet werden, um herauszufinden, wo die höchsten und tiefsten Punkte liegen.
Beispiel A.7 (Extremwerte 1) Es soll der Extremwert der Funktion \(f(x) = 3x^2+2\) gefunden werden.
Dazu werden zunächst die ersten und zweite Ableitung gebildet:
\[\begin{align*} f(x) &= 3x^2 + 2 \\ f'(x) &= 6x \\ f''(x) &= 6 \end{align*}\]
Die erste Ableitung wird gleich null gesetzt und gelöst:
\[\begin{equation*} 6x = 0 \Rightarrow x = 0 \end{equation*}\]
Da die zweite Ableitung eine positive Konstante ist, haben wir bei \(x=0\) den einzigen Extremwert, ein Minimum, gefunden, wie in Abbildung A.8 auch visuell zu erkennen ist.
Bei der Bestimmung eines Extremwertes einer Funktion \(f(x)\) ist es manchmal möglich die Berechnung zu vereinfachen, indem die Funktion \(f(x)\) zunächst mit einer anderen Funktion \(g(x)\) transformiert wird und die neue Funktion \(g(f(x))\) gebildet wird. Wenn die Funktion \(g(x)\) die Eigenschaft hat streng monoton wachsend zu sein, dann ist nämlich garantiert, dass das Maximum von \(f(x)\) und Maximum von \(g(f(x))\) an der gleichen Stelle \(x\) liegen.
Für das Maximum einer Funktion \(f(x)\) gilt für eine streng monoton wachsende Funktion \(g(x)\) formal.
\[ \arg\max_{x} f(x) = \arg\max_{x} g(f(x)) \]
Beispiel A.8 Die Logarithmusfunktion ist eine streng monoton wachsende Funktion, d.h. mit \(g(x) = \log(x)\) kann eine Funktion transformiert werden um möglicherweise einen Extremwert einfacher zu erhalten. Soll nun das Maximum einer Funktion \(f(x)\) gefunden werden und die Funktion enthält die Multiplikation von Termen, dann kann unter Umständen durch die Anwendung der Logarithmusfunktion die Form der Funktion vereinfacht werden kann.
Sei zum Beispiel die Funktion \(f(p) = p^x (1-p)^{n-x}\) gegeben (\(x\) und \(n\) sind unbestimmte Konstanten) und es soll das Maximum dieser Funktion für \(p\) bestimmt werden. Wird nun die Logarithmusfunktion auf \(f(p)\) angewendet ergibt sich der folgende Ansatz:
\[ \begin{align*} f(p) &= p^x(1-p)^{n-x} \\ \log(f(p)) &= \log(p^x (1-p)^{n-x}) \\ &= \log((p^x) \cdot ((1-p)^{n-x})) \\ &= \log(p^x) + \log((1-p)^{n-x}) \quad \text{Regel 1} \\ &= x\log(p) + (n-x)\log(1-p) \quad \text{Regel 3} \end{align*} \]
Nun wird die Ableitung von diesem Ausdruck berechnet unter Beachtung der Regel \(\frac{d}{dx}\log(x)=\frac{1}{x}\) und \(n\) und \(x\) und somit auch \(n-x\) Konstanten folgt:
\[ \begin{align*} \frac{d}{dp} \log(f(p)) &= \frac{d}{dp}\left(x\log(p) + (n-x)\log(1-p)\right) \\ &= \frac{d}{dp}x\log(p) + \frac{d}{dp}(n-x)\log(1-p) \\ &= x\frac{d}{dx}\log(p) + (n-x)\frac{d}{dp}\log(1-p) \\ &= x\frac{1}{p} + (n-x)\frac{1}{(1-p)}\cdot (-1) \quad\text{(Kettenregel)} \\ &= \frac{x}{p} - \frac{n-x}{1-p} \\ \end{align*} \]
Dieser Ausdruck kann nun mit Null gleichgesetzt werden um eine Extremum zu bestimmen.
\[ \begin{align*} \frac{x}{p} - \frac{n-x}{1-p} &= 0 && \mid +\frac{n-x}{1-p}\\ \Leftrightarrow \frac{x}{p} &= \frac{n-x}{1-p} && \mid \cdot p, \cdot (1-p)\\ \Leftrightarrow x(1-p) &= (n-x)p && \\ \Leftrightarrow x-px &= np - px && \mid +px \\ \Leftrightarrow x &= np && \mid \frac{1}{n} \\ \Leftrightarrow p &= \frac{x}{n} && \end{align*} \]
Die Funktion \(f(p) = p^x (1-p)^{n-x}\) nimmt also für den Wert \(p = \frac{x}{n}\) ein Maximum an. In Abbildung A.9 ist der Graph von \(f(p)\) für die Konstanten \(x=3\) und \(n=10\) abgetragen, einmal auf der Skala für \(f(p)\) und für \(log(f(p))\) abgetragen.
Es ist zu erkennen, dass in beiden Fällen das Maximum der Funktion an der gleichen Stelle sitzt. Insgesammt konnte daher, durch die Anwendung der Logarithmustransformation das Maximum mit einigen wenigen algebraischen Regeln ermittelt werden. Der Weg über \(f(x)\) wäre deutlich aufwendiger gewesen.
A.6 Vektoren
Ein Vektor ist eine mathematische Größe, die sowohl eine Richtung als auch eine Länge (Magnitude) hat. Man kann sich einen Vektor als einen Pfeil vorstellen, der von einem Punkt zu einem anderen zeigt. Zum Beispiel könnte ein Vektor in der Geometrie die Bewegung von einem Punkt A zu einem Punkt B darstellen. Vektoren werden oft in der Form \(\mathbf{a} = (x, y)\) dargestellt, wobei \(x\) und \(y\) die Komponenten des Vektors sind. Üblich ist die Darstellung als sogenannte Spaltenvektoren.
\[ \mathbf{a} = \begin{pmatrix}x\\y \end{pmatrix} \]
Die Anzahl der Komponenten gibt die Dimension des Vektor an. Im Beispiel hat der Vektor \(\mathbf{a}\) die beiden Komponenten \(x\) und \(y\), entsprechend folgt:
\[ \text{Dim}(\mathbf{a}) = 2 \] Soll entsprechend ein Punkt in einem dreidimensionalen Raum mittels eines Vektors \(\mathbf{v}\) dargestellt werden, folgt:
\[ \mathbf{v} = \begin{pmatrix} x \\ y \\ z \end{pmatrix} \] Mit Dim\((\mathbf{v})=3\). Insgesamt folgt daraus, dass ein Vektor eine geordnete Menge von Element ist. D.h. die beiden Vektoren \(\mathbf{a}\) und \(\mathbf{b}\) mit:
\[ \mathbf{a} = \begin{pmatrix} 2 \\ 3\end{pmatrix}\quad \mathbf{b} = \begin{pmatrix}3 \\2 \end{pmatrix} \]
Sind nicht gleich, \(\mathbf{a} \neq \mathbf{b}\). Oft werden die Komponenten eines Vektors mittels eines Index z.B. \(i\) gekennzeichnet. Sei zum Beispiel \(\mathbf{a}\) ein Vektor mit \(n\) Elementen, dann ist die folgende Darstellung ebenfalls üblich.
\[ \mathbf{a} = \begin{pmatrix} a_1\\ a_2 \\ \vdots \\ a_n \end{pmatrix} \]
Daraus folgt für die Gleichheit von zwei Vektoren \(\mathbf{a}\) und \(\mathbf{b}\), dass gelten muss:
\[ a_i = b_i, \forall i \in 1,2,\ldots,n \Rightarrow \mathbf{a} = \mathbf{b} \]
Ein Vektor kann flach dargestellt werden, als sogenannter Zeilenvektor.
\[ \mathbf{a} = \begin{pmatrix} a_1, a_2, \ldots, a_n\end{pmatrix} \]
Ein Spaltenvektor wird zu einem Zeilenvektor (und umgekehrt) durch transponieren.
\[ \mathbf{a} = \begin{pmatrix}x \\ y\end{pmatrix} \Rightarrow \mathbf{a}^T = \begin{pmatrix} x & y\end{pmatrix} \]
Vektoren tauchen in der Datenanalyse und somit der Statistik an allen Ecken und Enden auf. So lassen sich zum Beispiel die Daten der fünf besten Sprungweiten aus dem olympischen Weitsprungfinale 2024 der Männer mittels eines Vektors \(\mathbf{w}\) bündeln.
\[ \mathbf{w} = \begin{pmatrix} 8.48 \\ 8.36 \\ 8.34 \\ 8.20 \\ 8.14 \end{pmatrix} \]
Da die Repräsentation von Daten in Form von Vektoren von immenser Wichtigkeit bei der Datenanalyse ist, besitzen alle Programmiersprachen, so auch R spezielle Datentypen um Vektoren effizient abzubilden.
A.6.1 Rechenoperatoren mit Vektoren
Vektoren als mathematische Objekte besitzen eine ganze Reihe von Rechenoperationen die den Umgang mit ihnen deutlich vereinfachen. So können zwei Vektoren \(\mathbf{a}\) und \(\mathbf{b}\) mit der gleichen Anzahl von Komponenten miteinander addiert werden. Die Addition findet Komponentenweise statt indem die entsprechenden Komponenten der beiden Vektoren miteinander addiert werden. Daraus folgt mit zwei Vektoren \(\mathbf{a} = (a_1, a_2)\) und \(\mathbf{b} = (b_1, b_2)\):
\[ \mathbf{c} = \mathbf{a} + \mathbf{b} = \begin{pmatrix}a_1 \\ a_2\end{pmatrix} + \begin{pmatrix}b_1 \\ b_2\end{pmatrix} = \begin{pmatrix}a_1 + b_1 \\ a_2 + b_2\end{pmatrix} \]
Die Subtraktion von Vektoren wird entsprechend parallel durchgeführt:
\[ \mathbf{c} = \mathbf{a} - \mathbf{b} = \begin{pmatrix}a_1 \\ a_2\end{pmatrix} - \begin{pmatrix}b_1 \\ b_2\end{pmatrix} = \begin{pmatrix}a_1 - b_1 \\ a_2 - b_2\end{pmatrix} \]
Wenn ein Vektor \(\mathbf{v}\) mit einer Skalar \(s\) (einer Zahl) multiplizierst wird, dann wird jede Komponente des Vektors mit \(s\) multipliziert. Zum Beispiel:
\[ s \cdot \mathbf{v} = s \cdot \begin{pmatrix}x\\ y\end{pmatrix} = \begin{pmatrix} s \cdot x \\ s \cdot y\end{pmatrix} \]
Diese Rechenoperation wird als Skalarmultiplikation bezeichnet.
Die Länge eines Vektors \(\mathbf{v}\) kann mit dem Satz des Pythagoras berechnet werden und wird durch Betragsstriche \(||\) gekennzeichnet:
\[ \|\mathbf{v}\| = \sqrt{x^2 + y^2} \]
Allgemein gilt für einen Vektor mit \(n\) Elementen, dass die Länge wie folgt berechnet wird.
\[ \|\mathbf{v}\| = \sqrt{\sum_{i=1}^n v_i^2} \]
D.h. Elemente werden quadriert, aufsummiert und die Wurzel wird aus der Summe gezogen.
Eine weitere wichtige Operation mit Vektoren ist dass Skalarprodukt . Seien zwei Vektoren \(\mathbf{a}\) und \(\mathbf{b}\) mit \(n\) Elemente gegeben, dann ist dass Skalarprodukt wie folgt definiert.
\[ \mathbf{a} \cdot \mathbf{b} = \sum_{i=1}^n a_i\cdot b_i \]
Beispielsweise, mit den beiden Vektoren \(\mathbf{a} = (1,2,3)\) und \(\mathbf{b} = (11,12,13)\) folgt:
\[ \mathbf{a} \cdot \mathbf{b} = 1\cdot 11 + 2\cdot 12 + 3\cdot 13 = 74 \]
Mittels des Skalarprodukts lässt sich die Länge eines Vektors wie folgt definieren:
\[ \|\mathbf{a}\| = \sqrt{\mathbf{a} \cdot \mathbf{a}} \]
A.6.2 Spezielle Vektoren
In der Anwendung kommen ein paar spezielle Vektoren immer wieder vor. So wird als Einheitsvektor \(\mathbf{e}_i\) der Vektor bezeichnet der außer an der Position \(i\) nur Nullen als Komponenten hat. Zum Beispiel sieht der Vektor \(\mathbf{e}_2\) im dreidimensionalen Raum wie folgt aus:
\[ \mathbf{e}_2 = \begin{pmatrix} 0 \\ 1 \\ 0 \end{pmatrix} \]
Ein weiterer wichtiger Standardvektor ist der Einsvektor \(\mathbf{1}\) bei dem alle Komponenten gleich \(1\) sind. Manchmal wird tiefgestellt die Dimensionalität angegeben. D.h. der Einsvektor \(\mathbf{1}\) mit \(\text{Dim}(\mathbf{1})=3\) würde wie folgt dargestellt.
\[ \mathbf{1}_3 = \begin{pmatrix}1 \\ 1 \\ 1\end{pmatrix} \]
Mit der Skalarmultiplikation und dem Skalarprodukt könnte beispielweise der Mittelwert der Komponenten eines Vektors \(v\) der Dimension \(n\) wie folgt dargestellt werden (Warum?):
\[ \frac{1}{n}\mathbf{1}_n\cdot \mathbf{v} \]
Übungsaufgabe A.1 Wenn der Vektor \(\mathbf{s}^T = (1, 2, 3)\) gegeben ist. Was ist das Ergebnis der folgenden Operation?
\[ \mathbf{s} - \mathbf{1}_3\left(\frac{1}{3}\mathbf{1}_3\cdot s\right) \]
Als letztes noch einen relativ unspektakulären Vektor den Nullvektor \(\mathbf{0}\). Wie der Name schon andeutet, sind bei diesem Vektor alle Komponenten gleich Null. Zum Beispiel der Nullvektor \(\mathbf{0}\) der Dimension \(4\).
\[ \mathbf{0} = \begin{pmatrix}0 \\ 0 \\ 0 \\ 0\end{pmatrix} \]
Wie schon erwähnt, spielen Vektoren in der Statistik in der Anwendung wie auch der Theorie eine wichtige Rolle und begegnen einem ständig.
A.7 Matrizen
Eine Matrix ist eine rechteckige Anordnung von Zahlen die in Zeilen und Spalten angeordnet sind. Matrizen werden häufig in der Statistik, verwendet, um lineare Gleichungssysteme darzustellen, Transformationen durchzuführen oder Daten zu organisieren. Zum Beispiel könnten Fußballdaten mit Spielernummer, Anzahl der Pässe, Laufkilometer und Ballkontakte wie folgt in einer Matrix dargestellt werden.
\[ \begin{pmatrix} 7 & 55 & 11.57 & 70 \\ 10 & 50 & 10.96 & 71 \\ 24 & 36 & 12.46 & 58 \\ \vdots & \vdots & \vdots & \vdots \end{pmatrix} \]
Die Elemente einer Matrix werden durch zwei Indizes angegeben. Der erste Index steht für die Zeile während der zweite Index die Spalte angibt.
\[ \begin{matrix} & \begin{matrix} \text{Spalte}_1 & \text{Spalte}_2 & \mspace{0.5em}\ldots &\text{Spalte}_n \end{matrix} \\ \begin{matrix}\text{Zeile}_1\\\text{Zeile}_2 \\ \vdots \\ \text{Zeile}_m\end{matrix} & \begin{pmatrix} \mspace{1em}a_{11} \mspace{1em} & \mspace{1em}a_{12}\mspace{1em} & \ldots & \mspace{1em}a_{1n}\mspace{1em}\\ \mspace{1em}a_{21} \mspace{1em} & \mspace{1em}a_{22}\mspace{1em} & & \vdots \\ \mspace{1em} \vdots \mspace{1em} & & \ddots & \\ \mspace{1em} a_{m1} \mspace{1em} & & & a_{mn}\\ \end{pmatrix} \end{matrix} \]
Ein Beispiel für eine \(2 \times 2\)-Matrix ist zum Beispiel:
\[ \mathbf{A} = \begin{pmatrix} 1 & 10 \\ 2 & 20 \end{pmatrix} \]
Ein Beispiel für eine \(3 \times 4\) Matrix ist dementsprechend:
\[ \mathbf{B} = \begin{pmatrix} 21 & 17 & 23 & 24 \\ 11 & 12 & 17 & 19 \\ 3.1 & 2.7 & 102.5 & 13\end{pmatrix} \]
Eine Matrix mit \(m\) Zeilen und \(n\) Spalten wird als \(m \times n\)-Matrix bezeichnet. Dies wird als die Dimension der Matrix bezeichnet. D.h. die Dimension einer Matrix hat immer zwei Elemente.
Für die Matrix \(\mathbf{A} = \begin{pmatrix} 1 & 2 & 3 \\ 4 & 5 & 6\end{pmatrix}\) gilt dementsprechend:
\[ \mathrm{Dim}(\mathbf{A}) = 2\times 3 \]
Manchmal wird für Matrizen auch eine Kurzschreibeweise verwendet.
\[ \mathbf{A} = (a_{ij}), \quad i=1,\ldots,m, \quad j=1,\ldots,n \]
Konzeptionell besteht zwischen Vektoren und Matrizen eine enge Beziehung, da ein Vektor auch als degenerierte Matrizen interpretiert werden kann. Ein Vektor wäre in diesem Sinne eine Matrix mit \(n=1\) nur einer Spalte.
Wie bei Vektoren gilt auch für Matrizen das Gleichheit besteht, wenn alle Elemente gleich sind. Die Voraussetzung dafür ist daher auch, dass Gleichheit nur gelten kann, wenn die Anzahl der Zeilen und Spalten gleich ist.
\[ \mathbf{A} = \mathbf{B} \Rightarrow a_{ij} = b_{ij}, \forall i=1,\ldots,m,\quad j=1,\ldots,n \]
A.7.1 Matrixalgebra
Wie bei Vektoren bestehen für Matrizen auch bestimmten Rechenoperationen bzw. Regeln. Die einfachste Operation ist dabei die Addition, die wie bei den Vektoren elementweise durchgeführt wird. Zum Beispiel für zwei Matrizen \(\mathbf{A}\) und \(\mathbf{B}\) mit \(m = 2, n = 2\), gilt:
\[ \mathbf{A} + \mathbf{B} = \begin{pmatrix} a_{11} & a_{12} \\ a_{21} & a_{22}\end{pmatrix} + \begin{pmatrix} b_{11} & b_{12} \\ b_{21} & b_{22}\end{pmatrix} = \begin{pmatrix} a_{11} + b_{11} & a_{12} + b_{12} \\ a_{21} + b_{21} & a_{22} + b_{22} \end{pmatrix} \]
Beispiel A.9 Seien die beiden Matrizen \(\mathbf{A}\) und \(\mathbf{B}\) gegeben.
\[ \mathbf{A} = \begin{pmatrix} 1 & 2 \\ 3 & 4\end{pmatrix}, \quad \mathbf{B} = \begin{pmatrix} 10 & 20 \\ 30 & 40\end{pmatrix} \]
Dann folgt für die Addition von \(\mathbf{A} + \mathbf{B}\):
\[ \mathbf{A} + \mathbf{B} = \begin{pmatrix}11 & 22\\33 & 44\end{pmatrix} \]
Das gleiche Schema ergibt sich für die Subtraktion von Matrizen.
Die Addition von Matrizen ist Kommutativ und Assoziativ, d.h. es gilt für passende Matrizen \(\mathbf{A}, \mathbf{B}\) und \(\mathbf{C}\):
\[ \begin{aligned} \mathbf{A} + \mathbf{B} &= \mathbf{B} + \mathbf{A} \\ \mathbf{A} + (\mathbf{B} + \mathbf{C}) &= (\mathbf{A} + \mathbf{B}) + \mathbf{C} \\ \end{aligned} \]
Ein weiterer Operator ist die Skalarmultiplikation. Wiederum, wie bei einem Vektor, wird bei der Skalarmultiplikation jedes Matrixelement mit dem Skalar \(k\) multipliziert.
\[ k \cdot \mathbf{A} = \begin{pmatrix} k \cdot a_{11} & k \cdot a_{12} \\ k \cdot a_{21} & k \cdot a_{22} \end{pmatrix} \]
Die Skalarmultiplikation ist ebenfalls kommutativ, assoziativ und distributiv, d.h. es gilt für Skalare \(k,s\):
\[ \begin{aligned} k \cdot \mathbf{A} &= \mathbf{A}\cdot k \\ k \cdot (s\cdot\mathbf{A}) &= (k\cdot s) \cdot \mathbf{A} \\ (k + s)\cdot \mathbf{A} &= k\cdot \mathbf{A} + s\cdot\mathbf{A} \end{aligned} \]
Eine weitere wichtige Rechenoperation ist die Matrix-Multiplikation. Das Produkt zweier Matrizen entsteht durch die Multiplikation der Zeilen der ersten Matrix mit den Spalten der zweiten Matrix.
\[ \begin{gather*} \begin{pmatrix} a_{11} & a_{12} & \dots & a_{1n} \\ a_{21} & a_{22} & \dots & a_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ a_{m1} & a_{m2} & \dots & a_{mn} \end{pmatrix} \times \begin{pmatrix} b_{11} & b_{12} & \dots & b_{1p} \\ b_{21} & b_{22} & \dots & b_{2p} \\ \vdots & \vdots & \ddots & \vdots \\ b_{n1} & b_{n2} & \dots & b_{np} \end{pmatrix} = \begin{pmatrix} c_{11} & c_{12} & \dots & c_{1p} \\ c_{21} & c_{22} & \dots & c_{2p} \\ \vdots & \vdots & \ddots & \vdots \\ c_{m1} & c_{m2} & \dots & c_{mp} \end{pmatrix} \\ \end{gather*} \]
Dabei berechnen sich die Enträge von \(\mathbf{C} = (c_{ij})\) nach:
\[ c_{ij} = a_{i1}b_{1j} + a_{i2}b_{2j} + \dots + a_{in}b_{nj}, \quad i = 1,\ldots,m\quad j=1,\ldots,n \]
D.h. es wird das Skalarprodukt jeder Zeile von \(\mathbf{A}\) mit jeder Spalte von \(\mathbf{B}\) berechnet. Etwas übersichtlicher ist das Schema mit einem einfachen Beispiel zu erkennen. Seien \(\mathbf{A}\) und \(\mathbf{B}\):
\[ \mathbf{A} = \begin{pmatrix} a_1 & a_2 \\ a_3 & a_4 \end{pmatrix}, \quad \mathbf{B} = \begin{pmatrix} b_1 & b_2 \\ b_3 & b_4 \end{pmatrix}, \quad \ \]
Dann gilt für das Matrixprodukt \(\mathbf{AB}\):
\[ \begin{matrix} & \begin{pmatrix} b_1 & b_2 \\ b_3 & b_4 \end{pmatrix} \\ \begin{pmatrix} a_1 & a_2 \\ a_3 & a_4 \\ \end{pmatrix} & \begin{pmatrix} a_1 \cdot b_1 + a_2 \cdot b_3 & a_1\cdot b_2 + a_2\cdot b_4 \\ a_3 \cdot b_1 + a_4 \cdot b_3 & a_3\cdot b_2 + a_4\cdot b_4 \\ \end{pmatrix} \end{matrix} \]
Oder mit konkreten Zahlen:
\[ \mathbf{A} = \begin{pmatrix} 1 & 2 \\ 3 & 4\end{pmatrix}, \quad \mathbf{B} = \begin{pmatrix} 10 & 20 \\ 10 & 40\end{pmatrix} \]
folgt:
\[ \begin{matrix} & \begin{pmatrix} 10 & 20 \\ 10 & 40 \end{pmatrix} \\ \begin{pmatrix} 1 & 2 \\ 3 & 4 \\ \end{pmatrix} & \begin{pmatrix} 1 \cdot 10 + 2 \cdot 10 & 1\cdot 20 + 2\cdot 40 \\ 3 \cdot 10 + 4 \cdot 10 & 3\cdot 20 + 4\cdot 40 \\ \end{pmatrix} = \begin{pmatrix} 30 & 100 \\ 70 & 220 \end{pmatrix} \end{matrix} \]
Für die Matrizenmultiplikation müssen die Matrizen \(\mathbf{A}\) und \(\mathbf{B}\) konform sein. Die Anzahl der Spalten \(n\) von \(\mathbf{A}\) muss gleich der Anzahl der Zeilen \(m\) von \(\mathbf{B}\) sein. Die resultierende Matrix einer Matrizenmultiplikation hat die Form \(m_l\times n_r\) mit \(m_l\) die Anzahl der Zeilen der linken Matrix und \(n_r\) die Anzahl der Spalten der rechten Matrix. D.h. rechteckige Matrizen können oft nur in einer bestimmten Reihenfolge miteinander multipliziert werden, worauf bei der Lösung von Gleichungssystemen geachtet werden muss. D.h. es kann, bzw. ist oft üblich, das das Produkt \(\mathbf{AB}\) existiert, während das für \(\mathbf{BA}\) nicht der fall ist. Dazu kommt, dass die Matrix-Multiplikation, wenn sie möglich ist, Nichtkommutativ ist. D.h. es gilt üblicherweise:
\[ \mathbf{A} \cdot \mathbf{B} \neq \mathbf{B} \cdot \mathbf{A} \]
Daher wird auch zwischen Vormultiplikation (Multiplikation von links) und Nachmultiplikation (Multiplikation von rechts) unterschieden. Wie bereits erwähnt, ist die Multiplikation nur möglich wenn die linke Matrix die gleiche Anzahl von Spalten \(n\) hat wie die rechte Matrix Zeilen \(m\) hat.
Beispiel A.10 Seien zwei Matrizen \(\mathbf{A}\) und \(\mathbf{B}\) gegeben:
\[ \mathbf{A} = \begin{pmatrix}1 & 2 \\ 3 & 4 \\ 2 & 1\end{pmatrix}, \mathbf{B} = \begin{pmatrix} 1 & 1 \\ 2 & 2\end{pmatrix} \]
Da \(\mathbf{A}\) \(n = 2\) Spalten hat und \(\mathbf{B}\ m = 2\) Zeilen hat. Kann \(\mathbf{B}\) mit \(\mathbf{A}\) Nachmultipliziert werden.
\[ \mathbf{AB} = \begin{pmatrix}1 & 2 \\ 3 & 4 \\ 2 & 1\end{pmatrix} \begin{pmatrix} 1 & 1 \\ 2 & 2\end{pmatrix} = \begin{pmatrix}5 & 5\\11 & 11\\4 & 4\end{pmatrix} \]
Die Multiplikation von \(\mathbf{B}\) von links an \(\mathbf{A}\) funktioniert nicht, da die Matrizen nicht konform sind.
Matrizen können immer auf beide Arten, als Vor- und Nachmultipliziert, multipliziert werden, wenn sie quadratisch sind, d.h. es muss gelten \(m = n\). Dann sind die Produkte \(\mathbf{AB}\) und \(\mathbf{BA}\) beide definiert. Bei rechteckigen Matrizen ist dies nur der Fall wenn \(\mathbf{A}\ n \times m\) und \(\mathbf{B} \ m \times n\) ist.
Beispiel A.11 Seien zwei quadratische Matrizen \(\mathbf{A}\) und \(\mathbf{B}\) gegeben:
\[ \mathbf{A} = \begin{pmatrix}1 & 2 \\ 3 & 4 \end{pmatrix}, \mathbf{B} = \begin{pmatrix} 2 & 1 \\ 2 & 3\end{pmatrix} \]
In diesem Fall, da \(m = n = 2\) für beide Matrizen gilt, können beide Produkte \(\mathbf{AB}\) und \(\mathbf{BA}\) gebildet werden.
\[ \mathbf{AB} = \begin{pmatrix}1 & 2 \\ 3 & 4 \end{pmatrix} \begin{pmatrix} 2 & 1 \\ 2 & 3\end{pmatrix} = \begin{pmatrix}6 & 7\\14 & 15\end{pmatrix}\neq \begin{pmatrix}5 & 8\\11 & 16\end{pmatrix} =\begin{pmatrix} 2 & 1 \\ 2 & 3\end{pmatrix} \begin{pmatrix}1 & 2 \\ 3 & 4 \end{pmatrix} = \mathbf{BA} \]
An diesem Beispiel wird auch nochmal deutlich, dass die Matrizenmultiplikation selbst wenn möglich in den allermeisten Fällen nicht kommutativ ist.
Die Matrix-Multiplikation ist assoziativ und distributiv. Mit Matrizen \(\mathbf{A}, \mathbf{B}, \mathbf{C}\) und Skalaren \(s,k\) gilt:
\[ \begin{aligned} (\mathbf{AB})\mathbf{C} &= \mathbf{A}(\mathbf{BC}) \\ \mathbf{A}(s\mathbf{B}+k\mathbf{C}) &= \mathbf{A}s\mathbf{B} + \mathbf{A}k\mathbf{C} = s\mathbf{AB} + k\mathbf{AC} \\ \end{aligned} \]
Die Konformität der Matrizen wurde vorausgesetzt.
Wie Vektoren können Matrizen auch transponiert werden.
\[ \mathbf{A} = \begin{pmatrix}1 & 2\\3 & 4\end{pmatrix} \Rightarrow \mathbf{A}^T = \begin{pmatrix}1 & 3\\2 & 4\end{pmatrix} \]
D.h. beim Transponieren werden die Zeilen mit den Spalten vertauscht. Formal wenn die Matrix \(\mathbf{A}\) mit \((a_{ij})\) dargestellt wird.
\[ \mathbf{A} = (a_{ij}) \Rightarrow \mathbf{A}^T = (a_{ji}) \]
Beispiel A.12 Sei die Matrix \(\mathbf{B}\) gegeben.
\[ \mathbf{B} = \begin{pmatrix}1 & 2\\ 3 & 4\\ 5 & 6\end{pmatrix} \Rightarrow \mathbf{B}^T = \begin{pmatrix}1 & 3 & 5 \\ 2 & 4 & 6\end{pmatrix} \]
Nochmal, beim Transponieren vertauschen sich auch die Anzahl der Zeilen und Spalten. Aus einer \(n\times m\) Matrix wird eine \(m\times n\) Matrix.
Es gilt für jede Matrix \(\mathbf{A}\):
\[ \left(\mathbf{A}^T\right)^T = \mathbf{A} \tag{A.3}\]
Sowie mit Matrizen \(\mathbf{A}, \mathbf{B}\) und \(\mathbf{C}\):
\[ (\mathbf{AB})^T = \mathbf{B}^T\mathbf{A}^T, \quad (\mathbf{ABC})^T = \mathbf{C}^T\mathbf{B}^T\mathbf{A}^T \tag{A.4}\]
D.h. durch transponieren wird die Reihenfolge eines Produkts umgekehrt und die einzelnen Matrizen werden transponiert.
Das Skalarprodukt für Vektoren kann über die Interpretation von Vektoren als einfache Matrizen ebenfalls wie folgt dargestellt werden. Seien die Vektoren \(\mathbf{a}\) und \(\mathbf{b}\) mit \(\text{Dim}(\mathbf{a}) = \text{Dim}(\mathbf{b})\) gegeben, so folgt:
\[ \mathbf{a}^T \cdot \mathbf{b} = \sum_{i=1}^n a_i \cdot b_i \]
Eine weitere Rechenoperation bzw. Kennzahl einer Matrix ist die Spur (engli. trace ). Bei quadratischen Matrizen werden die Elemente, die von der oberen linken Ecke zur unteren rechten Ecke verlaufen \(a_{ii}, i=1,\ldots,n=m\) als die Hauptdiagonale bezeichnet. Die Spur einer Matrix ist nun die Summe der Elemente auf der Hauptdiagonalen. Mit einer Matrix \(\mathbf{A}\):
\[ \mathbf{A} =\begin{pmatrix} a_{11} & a_{12} & \dots & a_{1n} \\ a_{21} & a_{22} & \dots & a_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ a_{n1} & a_{n2} & \dots & a_{nn} \end{pmatrix} \]
gilt für die Spur:
\[ \text{Spur} = \mathrm{Tr}(\mathbf{A}) = \sum_{i=1}^n a_{ii} \tag{A.5}\]
Beispiel A.13 Sei zum Beispiel die Matrix \(\mathbf{A}\) gegeben:
\[ \mathbf{A} = \begin{pmatrix} 1 & 2 \\ 3 & 4 \end{pmatrix} \Rightarrow \mathrm{Tr}(\mathbf{A}) = 1 + 4 = 5 \]
Manchmal ist es hilfreich Matrizen anhand von Spaltenvektor bzw. Zeilenvektoren zu konstruieren. Sei wiederum eine Matrix \(\mathbf{A} = (a_{ij})\) gegeben und die einzelnen Spalten seien mit \(\mathbf{a}_j\) und die Zeilen mit \(\tilde{\mathbf{a}}_i\) bezeichnet. Dann ergibt sich folgende Darstellung von \(\mathbf{A}\) nach den Spaltenvektoren \(\mathbf{a}_j\):
\[ \mathbf{A} = \begin{pmatrix} \mathbf{a}_1 & \mathbf{a}_2 & \ldots & \mathbf{a}_n \end{pmatrix} \]
bzw. nach den Zeilenvektoren \(\tilde{\mathbf{a}}_i\)
\[ \mathbf{A} = \begin{pmatrix} \tilde{\mathbf{a}}_1 \\ \tilde{\mathbf{a}}_2 \\ \vdots \\ \tilde{\mathbf{a}}_m \end{pmatrix} \]
Beispiel A.14 Sei eine Matrix \(\mathbf{B}\) gegeben mit:
\[ \mathbf{B} = \begin{pmatrix} 10 & 13 \\ 12 & 27 \\ 1.2 & 7 \end{pmatrix} \]
Dann sind die Zeilenvektoren wie folgt definiert und die Konstruktion von \(\mathbf{B}\) nach den Zeilenvektoren sieht folgendermaßen aus:
\[ \begin{gather*} \tilde{\mathbf{b}}_1 = \begin{pmatrix} 10 & 13\end{pmatrix},\quad \tilde{\mathbf{b}}_2 = \begin{pmatrix} 12 & 27\end{pmatrix},\quad \tilde{\mathbf{b}}_3 = \begin{pmatrix} 1.2 & 7\end{pmatrix} \\ \mathbf{B} = \begin{pmatrix} \tilde{\mathbf{b}}_1 \\ \tilde{\mathbf{b}}_2 \\ \tilde{\mathbf{b}}_3 \end{pmatrix} \end{gather*} \]
bzw. die Konstruktion nach den Spaltenvektoren:
\[ \begin{gather*} \mathbf{b}_1 = \begin{pmatrix} 10 \\ 12 \\ 1.2\end{pmatrix},\quad \mathbf{b}_2 = \begin{pmatrix} 13 \\ 27 \\ 7\end{pmatrix},\quad \\ \mathbf{B} = \begin{pmatrix} \mathbf{b}_1 & \mathbf{b}_2 \end{pmatrix} \end{gather*} \]
Durch die Unterteilung in Zeilen und Spaltenvektoren wird auch eine neue Darstellung für die Matrizenmultiplikation erhalten. Seien zum Beispiel die Matrizen \(\mathbf{A}\) und \(\mathbf{B}\) gegeben.
\[ \mathbf{A} = \begin{pmatrix}\tilde{\mathbf{a}}_1 \\ \vdots \\ \tilde{\mathbf{a}}_n\end{pmatrix}, \quad \mathbf{B} = \begin{pmatrix} \mathbf{b}_1 & \ldots \mathbf{b}_n \end{pmatrix} \]
Dann gilt:
\[ \mathbf{AB} = \begin{pmatrix} \tilde{\mathbf{a}}_1 \mathbf{b}_1 & \tilde{\mathbf{a}}_1 \mathbf{b}_2 & \ldots & \tilde{\mathbf{a}}_1 \mathbf{b}_n \\ \tilde{\mathbf{a}}_2 \mathbf{b}_1 & \tilde{\mathbf{a}}_2 \mathbf{b}_2 & \ldots & \tilde{\mathbf{a}}_2 \mathbf{b}_n \\ \tilde{\mathbf{a}}_3 \mathbf{b}_1 & \vdots & \ddots & \vdots \\ \tilde{\mathbf{a}}_n \mathbf{b}_1 & \tilde{\mathbf{a}}_n \mathbf{b}_2 & \ldots & \tilde{\mathbf{a}}_n \mathbf{b}_n \\ \end{pmatrix} \]
Hier wird auch nochmal deutlich, dass die einzelnen Elemente von \(\mathbf{AB}\) durch Skalarmultiplikation der Zeilen von \(\mathbf{A}\) mit den Spalten von \(\mathbf{B}\) erhalten wird.
A.7.2 Spezielle Matrizen
Im folgenden sind ein paar spezielle Matrizen eingeführt, die in der Behandlung immer wieder auftauchen und daher entweder spezielle Zeichen bekommen oder bestimmte Eigenschaften aufweisen.
Eine symmetrische Matrix \(\mathbf{A}\) ist eine quadratische Matrix deren Transponierte gleich der ursprünglichen Matrix ist.
\[ \mathbf{A} = (a_{ij}) = (a_{ji}) = \mathbf{A}^T \]
Zum Beispiel:
\[ \mathbf{A} = \begin{pmatrix} 1 & 2 \\ 2 & 3\end{pmatrix} \Rightarrow \mathbf{A}^T = \begin{pmatrix} 1 & 2 \\ 2 & 3\end{pmatrix} = \mathbf{A} \]
Beispiel A.15 Aus einer beliebigen Matrix kann eine symmetrische Matrix gewonnen werden indem die Matrix mit ihrer Transponierten entweder Vor- oder Nachmultipliziert wird. Sei zum Beispiel die Matrix \(\mathbf{S}\) gegeben mit:
\[ \mathbf{S} = \begin{pmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \end{pmatrix} \]
Dann folgt:
\[ \mathbf{SS}^T = \begin{pmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \end{pmatrix} \begin{pmatrix} 1 & 4 \\ 2 & 5 \\ 3 & 6 \end{pmatrix} = \begin{pmatrix} 14 & 32 \\ 32 & 77 \end{pmatrix} \]
bzw.
\[ \mathbf{S}^T\mathbf{S} = \begin{pmatrix} 1 & 4 \\ 2 & 5 \\ 3 & 6 \end{pmatrix} \begin{pmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \end{pmatrix} = \begin{pmatrix} 17& 22 & 27 \\ 22 & 29 & 36 \\ 27 & 36 & 45 \end{pmatrix} \]
Dies lässt sich auch direkt unter Anwendung der Regeln Gleichung A.4 und Gleichung A.3.
\[ (\mathbf{A}^T\mathbf{A})^T = \mathbf{A}^T\mathbf{A}^{T^T} = \mathbf{A}^T\mathbf{A} \]
Eine zentrale Matrix in der Matrizenalgebra ist die Einheitsmatrix oder Identitätsmatrix \(\mathbf{I}\) (engl. Identity matrix). Die Einheitsmatrix ist ebenfalls quadratisch und hat auf der Hauptdiagonale nur Einsen und sonst sind alle Komponenten Null. Manchmal wird die Dimension der Matrix tiefgestellt angegeben. So sieht die Einheitsmatrix mit \(m = n = 3\) wie folgt aus:
\[ \mathbf{I}_3 = \begin{pmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{pmatrix} \]
Die Einheitsmatrix hat eine ähnliche Funktion wie die \(1\) bei der Multiplikation bei den normalen Zahlen. Es gilt für eine quadratische Matrix \(\mathbf{A}\) der Dimension \(n \times n\):
\[ \mathbf{I}_n\mathbf{A} = \mathbf{AI}_n = \mathbf{A} \]
Entsprechend kann die Einheitsmatrix \(\mathbf{I}\) für rechteckige Matrizen unter Berücksichtigung der Konformität entweder Vor- oder Nachmultipliziert werden.
Für die Matrix \(\mathbf{A}\) mit
\[ \mathbf{A} = \begin{pmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \end{pmatrix} \]
gilt entsprechend:
\[ \mathbf{AI}_3 = \begin{pmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{pmatrix} = \begin{pmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \end{pmatrix} \]
bzw:
\[ \mathbf{I}_2\mathbf{A} = \begin{pmatrix}1 & 0 \\ 0 & 1\end{pmatrix}\begin{pmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \end{pmatrix} = \begin{pmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \end{pmatrix} \]
Mit den Einheitsvektoren \(\mathbf{e}_i\) ergibt sich auch die folgende Darstellung der Einheitsmatrix \(\mathbf{I}_n\) nach den Spaltenvektoren:
\[ \mathbf{I}_n = \begin{pmatrix} \mathbf{e}_1 & \mathbf{e_2} & \ldots & \mathbf{e}_n \end{pmatrix} \]
bzw. mit \(\tilde{\mathbf{e}}_i = \mathbf{e}_i^T\) nach den Zeilenvektoren.
\[ \mathbf{I}_n = \begin{pmatrix} \mathbf{e}_1^T \\ \mathbf{e}_1^T \\ \vdots \\ \mathbf{e}_n^T \end{pmatrix} \]
Die Einheitsmatrix ist dabei ein Spezialfall der sogenannten Diagonalmatrizen. Diagonalmatrizen sind dementsprechend auch quadratische Matrizen die aber im Gegensatz zur Einheitsmatrix \(\mathbf{1}\) beliebige Elemente auf der Hauptdiagonalen haben können. Die allgemeine Form ist dementsprechend:
\[ \mathbf{D} = \begin{pmatrix} d_{11} & 0 & \ldots & 0 \\ 0 & d_{22} & \ddots & 0 \\ \vdots & \ddots & \ddots & 0 \\ 0 & \ldots & & d_{nn} \end{pmatrix} \]
Ein Beispiel für \(\mathbf{D}\) ist:
\[ \mathbf{D} = \begin{pmatrix} 11 & 0 & 0 & 0 \\ 0 & 37 & 0 & 0 \\ 0 & 0 & 29 & 0 \\ 0 & 0 & 0 & 31 \end{pmatrix} \]
Diagonale Matrizen sind symmetrisch, es gilt also \(\mathbf{D}^T = \mathbf{D}\). Manchmal wird in der Literatur auch die Schreibweise:
\[ \mathrm{diag}(d_1, d_2, \ldots, d_n) \]
verwendet. Zum Beispiel
\[ \mathrm{diag}(1,2,3) = \begin{pmatrix}1 & 0 & 0 \\ 0 & 2 & 0 \\0 & 0 & 3\end{pmatrix} \]
Beispiel A.16 In der Anwendungen können Diagonalmatrizen verwendet werden um bestimmte Elemente in einer Matrix zu gewichten. Sollen zum Beispiel alle Elemente in der ersten Zeile einer zweizeiligen Matrix \(\mathbf{A}\) doppelt gewichtet werden. Könnte dies mit einer Diagonalmatrix \(\mathbf{D}\) wie folgt ausgedrückt werden.
\[ \begin{gather*} \mathbf{A} = \begin{pmatrix} 1 & 2 \\ 3 & 4\end{pmatrix}, \quad \mathbf{D} = \begin{pmatrix} 2 & 0 \\ 0 & 1 \end{pmatrix} \\ \mathbf{DA} = \begin{pmatrix} 2 & 4 \\ 3 & 4 \end{pmatrix} \end{gather*} \]
Eine weitere Matrix die im Zusammenhang mit ANOVA von Bedeutung ist, ist die Einsmatrix \(\mathrm{1}_{m\times x}\). Bei der Einsmatrix sind alle Elemente gleich \(1\). Zum Beispiel:
\[ \mathbf{1}_{2\times 3} = \begin{pmatrix} 1 & 1 & 1 \\ 1 & 1 & 1 \end{pmatrix} \]
Wenn die Einsmatrix quadratisch ist, wird oft das Symbol \(\mathbf{J}_n\) verwendet. Zum Beispiel die \(\mathbf{J}_3\) mit:
\[ \mathbf{J}_3 = \begin{pmatrix} 1 & 1 & 1 \\ 1 & 1 & 1 \\ 1 & 1 & 1 \end{pmatrix} \]
Die Einsmatrix \(\mathbf{1}_{m\times n}\) und die Einsvektoren \(\mathbf{1}_{n}\) haben ebenfalls ein enge Beziehung, da die Vekoren verwendet werden können um eine Einsmatrix zu erstellen. Seien zum Beispiel die Einsvektoren \(\mathbf{1}_2\) und \(\mathbf{1}_3\) gegeben dann folgt:
\[ \mathbf{1}_2 \cdot \mathbf{1}_3^T = \begin{pmatrix}1 \\ 1\end{pmatrix}\cdot \begin{pmatrix}1 & 1 & 1\end{pmatrix} = \begin{pmatrix} 1 & 1 & 1 \\ 1 & 1 & 1 \end{pmatrix} = \mathbf{1}_{2\times 3} \]
bzw.
\[ \mathbf{1}_3 \cdot \mathbf{1}_2^T = \begin{pmatrix}1 \\ 1 \\1\end{pmatrix}\cdot \begin{pmatrix}1 & 1 \end{pmatrix} = \begin{pmatrix} 1 & 1 \\ 1 & 1 \\ 1 & 1 \end{pmatrix} = \mathbf{1}_{3\times 2} \]
Eine weitere Matriz ist die Nullmatrix $_{mn}, die wie der Name sagt, alle Einträge gleich Null hat.
\[ \mathbf{0}_{2\times 3} = \begin{pmatrix} 0 & 0 & 0 \\ 0 & 0 & 0 \end{pmatrix} \]
A.7.3 Gleichungssysteme und Matrizen
Matrizen weisen eine enge Beziehung zum Lösung von Gleichungssystemen auf. Sei folgendes Problem gegeben:
Tina geht zum Bäcker. Am Montag kauft sie \(3\) Kaisersemmeln und \(2\) Weltmeisterbrötchen für insgesamt 3,20 €. Am Dienstag kauft sie \(5\) Kaisersemmeln und \(4\) Weltmeisterbrötchen und bezahlt 6,00 €. Wie viel kostet eine Kaisersemmel und wie viel ein Weltmeisterbrötchen? Als Gleichungssystem folgt aus der Aufgabenstellung:
\[ \begin{aligned} 3\cdot \text{Kaiser} + 2\cdot \text{Weltmeister} &= 3,20 \\ 5\cdot \text{Kaiser} + 4\cdot \text{Weltmeister} &= 6,00 \end{aligned} \]
Dieses Gleichungssystem kann in Matrizenschreibweise überführt werden:
\[ \begin{pmatrix}3 & 2 \\5 & 4\end{pmatrix}\begin{pmatrix}\text{Kaiser}\\\text{Weltmeister}\end{pmatrix} = \begin{pmatrix}3,2\\6\end{pmatrix} \]
Um dieses Gleichungssystem zu lösen sind zunächst ein paar Zwischenschritte bzw. Konzepte notwendig. Zunächst wird die Inverse einer Matrix benötigt. Konzeptionell ist die Inverse einer Matrix ähnlich zum Teilen mit normalen Zahlen zu sehen. Zum Beispiel sei die Zahl \(s = 3\) gegeben. Dann lieft die Multiplikation mit der Inversen von \(s\) folgenden Zusammenhang.
\[ s \cdot \frac{1}{s} = s \cdot s^{-1} = 1 \]
Übertragen auf Matrizen mit einer Matrix \(\mathbf{A}\) und dem Einselement \(\mathbf{I}\) (der Einheitsmatrix) folgt:
\[ \mathbf{A} \cdot \mathbf{A}^{-1} = \mathbf{A}^{-1}\mathbf{A} = \mathbf{I} \]
Dies ist auch direkt die Definition der Inversen von \(\mathbf{A}\). Da die Inverse Vor- und Nachmultipliziert werden kann, handelt es sich bei \(\mathbf{A}\) um eine quadratische Matrix. Darauf folgt, dass \(\mathbf{A}^{-1}\) ebenfalls quadratisch ist. Die Inverse \(\mathbf{A}^{-1}\) ist rechts- wie auch linksinvers.
Beispiel A.17 Sei die Matrix \(\mathbf{A}\) gegeben mit:
\[ \mathbf{A} = \begin{pmatrix} 1 & 3 \\ 2 & 0 \end{pmatrix} \]
Dann ist die Matrix \(\mathbf{B}\) mit:
\[ \mathbf{B} = \begin{pmatrix} 0 & \frac{1}{2} \\ \frac{1}{3} & -\frac{1}{6} \end{pmatrix} \] die Inverse \(\mathbf{A}^{-1}\) von \(\mathbf{A}\), denn es gilt:
\[ \mathbf{AB} = \begin{pmatrix} 1 & 3 \\ 2 & 0 \end{pmatrix} \begin{pmatrix} 0 & \frac{1}{2} \\ \frac{1}{3} & -\frac{1}{6} \end{pmatrix} = \begin{pmatrix} 1 \cdot 0 + 3 \cdot \frac{1}{3} & 1\cdot \frac{1}{2} + 3\cdot-\frac{1}{6} \\ 2 \cdot 0 + 0 \cdot \frac{1}{3} & 2\cdot \frac{1}{2} + 0\cdot-\frac{1}{6} \end{pmatrix} = \begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix} \] bzw.
\[ \mathbf{BA} = \begin{pmatrix} 0 & \frac{1}{2} \\ \frac{1}{3} & -\frac{1}{6} \end{pmatrix} \begin{pmatrix} 1 & 3 \\ 2 & 0 \end{pmatrix} = \begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix} \]
Daran schließt sich nun die Frage ob alle quadratischen Matrizen invertierbar sind. Dies ist tatsächlich nicht der Fall. Damit ein Matrix \(\mathbf{A}\) invertierbar ist, muss sie nicht-singulär sein. Damit eine Matrix nicht-singulär ist, müssen die Spaltenvektoren bzw. die Zeilenvektoren voneinander linear unabhängig sein. Was ist nun linear unabhängig? Zunächst die Definition:
Definition A.1 (Lineare Unabhängigkeit) Eine Menge von \(n\) Vektoren \({\mathbf{v}_1, \mathbf{v}_2, \ldots, \mathbf{v}_n}\) ist linear unabhängig, wenn die einzige mögliche Lösung für Gleichung A.6, mit \(a_i\) reelle Zahlen:
\[ a_1 \cdot \mathbf{v}_1 + a_2 \cdot \mathbf{v}_2 + \cdots + a_n \cdot \mathbf{a}_n = \mathbf{0} \tag{A.6}\]
ist, dass alle \(a_i = 0, i=1,2,\ldots,n\) gilt.
Zum Beispiel seien die beiden Einheitsvektoren \(\mathbf{e}_1\) und \(\mathbf{e}_2\) im zweidimensionalen Raum gegeben. Dann sieht Gleichung A.6 wie folgt aus:
\[ a_1 \cdot \mathbf{e}_1 + a_2 \cdot \mathbf{e}_2 = a_1 \cdot \begin{pmatrix}1 \\ 0\end{pmatrix} + a_2\cdot \begin{pmatrix} 0 \\ 1\end{pmatrix} = \begin{pmatrix}0 \\ 0\end{pmatrix} \]
In diesem Fall sind die einzigen möglichen Werte für \(a_1\) und \(a_2\) gleich Null, damit der resultierende Vektor nach der jeweiligen Skalarmultiplikation und Addition den Nullvektor ergibt. Dementsprechend ist die Matrix mit den Einheitsvektoren \(\mathbf{e}_1\) und \(\mathbf{e}_2\) nicht-singulär und besitzt eine Inverse.
\[ \begin{pmatrix} \mathbf{e}_1 & \mathbf{e}_2 \end{pmatrix} = \begin{pmatrix} 1 & 0 \\ 0 & 1\end{pmatrix} \]
In diesem Fall ist Matrix die Einheitsmatrix \(\mathbf{I}_2\) deren Inverse die Matrix selbst ist.
Ein weiteres Beispiel, sei \(\mathbf{A}\) wie folgt gegeben: \[ \mathbf{A} = \begin{pmatrix} 2&4\\3&1\end{pmatrix} \]
Dann ist die Matrix:
\[ \mathbf{A}^{-1} = \begin{pmatrix}-\frac{1}{10} & \frac{4}{10} \\ \frac{3}{10} & -\frac{2}{10} \end{pmatrix} \]
Die Inverse, denn es gilt:
\[ \begin{split} \mathbf{AA}^{-1} &= \begin{pmatrix} 2&4\\3&1\end{pmatrix}\begin{pmatrix}-\frac{1}{10} & \frac{4}{10} \\ \frac{3}{10} & -\frac{2}{10} \end{pmatrix} \\ &= \begin{pmatrix} 2\cdot-\frac{1}{10} + 4\cdot\frac{3}{10} & 2\cdot\frac{4}{10} -4\cdot\frac{2}{10}\\ 3\cdot-\frac{1}{10} + 1\cdot\frac{3}{10} & 3\cdot\frac{4}{10} - 1\cdot\frac{2}{10} \end{pmatrix} \\ &= \begin{pmatrix} 1 & 0 \\ 0 & 1\end{pmatrix} \end{split} \]
bzw. genause \(\mathbf{A}^{-1}\mathbf{A} = \mathbf{I}\). Nun ein Beispiel einer singulären Matrix \(\mathbf{B}\).
\[ \mathbf{B} = \begin{pmatrix} 1 & 2 \\ 2 & 4 \end{pmatrix} \]
Für das Gleichungssystem in Gleichung A.6 resultiert:
\[ a_1 \cdot \begin{pmatrix}1 \\2\end{pmatrix} + a_2 \cdot \begin{pmatrix}2 \\ 4\end{pmatrix} = \mathbf{0} \]
In diesem Fall sind alle Werte für die gilt \(a_1 = -\frac{1}{2}a_2\) Lösungen dieser Gleichung. Zum Beispiel mit \(a_1 = 4\) und \(a_2 = -2\) gilt.
\[ 4 \cdot \begin{pmatrix}1 \\2\end{pmatrix} - 2 \cdot \begin{pmatrix}2 \\ 4\end{pmatrix} = \mathbf{0} \]
Nun wird noch ein weiteres Konzept benötigt. Der Rang einer Matrix.
Definition A.2 (Rang einer Matrix ) Der Rang einer Matrix \(\mathbf{A}\) ist die Anzahl der linear unabhängigen Spalten bzw. Zeilenvektoren und wird ausgedrückt durch \(\mathcal{R}(\mathbf{A})\).
Insgesamt gilt:
Theorem A.1 (Rang und Invertierbarkeit) Eine quadratische Matrix deren Rang gleich der Anzahl der Spalten ist, ist invertierbar.
Für eine invertierbare Matrix \(\mathbf{A}\) gilt:
\[ \mathbf{AA}^{-1} = \mathbf{A}^{-1}\mathbf{A} = \mathbf{I} \tag{A.7}\]
Im Folgenden wird nun allerdings nicht darauf eingegangen, wie der Rang einer Matrix bestimmt werden kann. Diese Berechnung wird dem Rechner überlassen, ebenso wie die Berechnung von Inversen (Aus der Schulzeit sei an das Gauß’sche Eliminationsverfahren erinnert). Für die Inhalte in diesem Skriptum ist nur ein konzeptionelles Verständnis derjenigen Sachverhalte der Matrixalgebra wichtig, wie sie für die Anwendung von statistischen Methoden, insbesondere im Rahmen der Regression, notwendig sind.
Für das Ausgangsproblem der Brötchenpreise folgt nun.
\[ \begin{pmatrix}3 & 2 \\5 & 4\end{pmatrix}\begin{pmatrix}\text{Kaiser}\\\text{Weltmeister}\end{pmatrix} = \begin{pmatrix}3,2\\6\end{pmatrix} \]
mit den Festsetzungen:
\[ \begin{gather*} \mathbf{X} = \begin{pmatrix}3 & 2 \\5 & 4\end{pmatrix}, \quad \mathbf{b} = \begin{pmatrix}\text{Kaiser}\\\text{Weltmeister}\end{pmatrix}, \quad \mathbf{y} = \begin{pmatrix}3,2\\6\end{pmatrix}\\ \mathbf{Xb} = \mathbf{y} \end{gather*} \]
Kann dieses Gleichungssystem gelöst werden, indem eine Inverse für \(\mathbf{X}\) gefunden wird, dann gilt nämlich mit:
\[ \mathbf{Xb} = \mathbf{y} \]
Durch Linksmulitplikation beider Seiten mit \(\mathbf{X}^{-1}\) folgt:
\[ \begin{aligned} \mathbf{X}^{-1}\mathbf{Xb} &= \mathbf{X}^{-1}\mathbf{y} \\ \mathbf{Ib} &= \mathbf{X}^{-1}\mathbf{y} \\ \mathbf{b} &= \mathbf{X}^{-1}\mathbf{y} \\ \end{aligned} \]
Eine Inverse für \(\mathbf{X}\) kann über R ermittelt werden, und es folgt:
\[ \begin{gather*} \mathbf{X}^{-1} = \begin{pmatrix} 2 & -1 \\ -2.5 & 1.5 \end{pmatrix} \\ \mathbf{b} = \begin{pmatrix} 2 & -1 \\ -2.5 & 1.5 \end{pmatrix} \begin{pmatrix} 3,2 \\ 6 \end{pmatrix} = \begin{pmatrix} 0.4 \\ 1 \end{pmatrix} \end{gather*} \]
D.h. ein Kaiserbrötchen kostet \(40\) Cent und eine Weltmeisterbrötchen einen Euro.
Wenn eine Inverse transponiert wird dann gilt weiterhin der Zusammenhang:
\[ (\mathbf{A}^{-1})^T = (\mathbf{A}^T)^{-1} \tag{A.8}\]
D.h. die Reihenfolge von Transponieren und Invertieren kann vertauscht werden.
Für die spätere Anwendung ist ein weiteres Theorem wichtig, dass hier nur zur Kenntnisnahme angeführt wird.
Theorem A.2 Der Rang einer Matrix \(\mathbf{A}\) ist gleich dem Rang von \(\mathbf{A}^T\mathbf{A}\). Formal \(\mathcal{R}(\mathbf{A}) = \mathcal{R}(\mathbf{A}^T\mathbf{A})\).
Insgesamt sind Matrizen wie Vektoren aus der Statistik und der Datenanalytik nicht mehr wegzudenken. Sie bieten eine kompakte Darstellung von Daten und Beziehungen und spielen eine zentrale Rolle in der linearen Algebra sowie vielen angewandten Wissenschaften. Die Behandlung hier ist lediglich als eine Übersicht der absolut minimalen Zusammenhänge zu verstehen die immer wieder in die Praxis durchscheinen.